Топографические VAE: как обучать эквивариантные капсулы 0:00
В видеообзоре исследователь Янник Килхер (Yannic Kilcher) подробно разбирает научную работу «Topographic VAEs learn Equivariant Capsules» авторов Т. Андерсона Келлера (T. Anderson Keller) и Макса Веллинга (Max Welling). Главная идея статьи заключается в создании нового типа вариационных автокодировщиков (VAE), где латентное пространство организовано не в виде набора независимых переменных, а топографически, что позволяет модели естественным образом отображать трансформации реального мира в латентные преобразования.
Концепция и цель модели 1:42
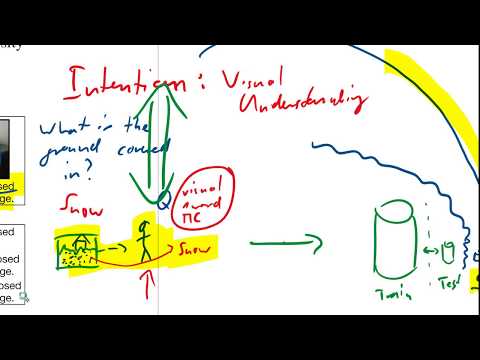
Основная задача исследователей — построить архитектуру генеративной модели, которая при обучении на последовательностях кадров видео «понимает» непрерывные и медленные изменения объектов, будь то поворот или смена цвета.
- Принцип работы: Модель получает на вход не отдельное изображение, а всю последовательность. Цель — создать такое латентное представление фокусного кадра (
z-hat), чтобы определенные операции в латентном пространстве (например, «roll» — циклический сдвиг переменных) соответствовали переходу к будущим кадрам видео,. - Терминология: Авторы используют термин «капсулы» для описания двух наборов латентных переменных, которые можно независимо подвергать трансформации (ротации).
- Отличие от стандартных VAE: В обычном VAE латентные переменные считаются независимыми гауссовскими величинами. Здесь же авторы предлагают использовать топографическое распределение, которое делает переменные зависимыми друг от друга, отражая структуру данных.
Техническая реализация: от Gaussians к T-распределениям 12:40
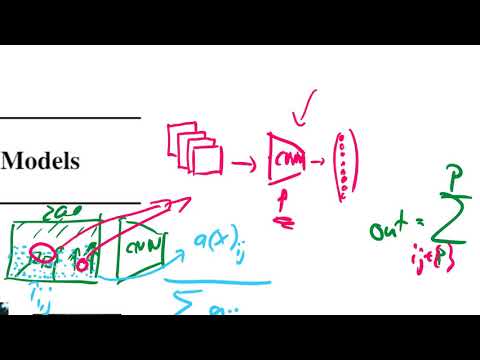
Поскольку обратное распространение ошибки (backpropagation) эффективно работает с гауссовскими распределениями, исследователи нашли способ сконструировать более сложное распределение на основе простых гауссианов.
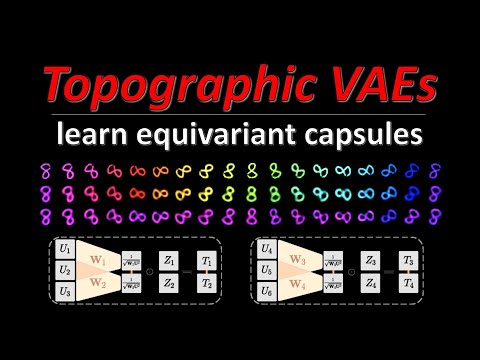
- Алгоритм трансформации: Энкодер выдает две группы гауссовских переменных:
zиu. Затем переменныеuвозводятся в квадрат, суммируются, и на их основе нормализуетсяz. В результате декодер получает на вход значения, распределенные по «Топографическому продукту t-распределений Стьюдента» (TPOT),. - Топографическая организация: Введение топографии достигается через определение окрестностей для переменных
u. Если разные переменные делят общиеuв рамках этой окрестности, они становятся зависимыми, что позволяет модели улавливать корреляции. - Временная когерентность: Чтобы модель «научилась» предсказывать изменения, процесс «roll» применяется не к финальному
t, а к переменнымuдо их подстановки в формулу, в зависимости от их удаления от фокусного кадра.
Анализ и выводы Янника Килхера 27:25
По мнению Килхера, данная статья представляет собой скорее «идею-доказательство» (idea paper), нежели готовое решение для индустрии.
- Сложность: Эксперименты в работе выглядят довольно «хрупкими» и требуют тщательной настройки гиперпараметров.
- Преимущество метода: В отличие от стандартных нейросетей, которые должны заучивать каждую трансформацию как параметризованную функцию (например, «после красного идет оранжевый»), данная модель способна отображать переходы в латентное пространство.
- Результаты: Даже при обучении на отдельных трансформациях (только ротация или только изменение цвета), модель продемонстрировала способность к обобщению на комбинации этих изменений.
Килхер признается, что для него остается открытым вопрос, является ли это «гигантским шагом» в области машинного обучения или лишь элегантным трюком для идеализированных сценариев, однако он рекомендует статью к прочтению всем, кто интересуется архитектурами латентных пространств.