Context R-CNN: Инновационный подход к распознаванию объектов с помощью временного контекста 0:00
Исследователи представили Context R-CNN — архитектуру, которая значительно повышает точность обнаружения объектов на стационарных камерах (например, фотоловушках или камерах видеонаблюдения), используя данные из прошлого и будущего,. В отличие от стандартных методов, работающих с одиночными кадрами, эта модель динамически «вспоминает» контекст, анализируя последовательности изображений, снятых одной и той же камерой в разные моменты времени.
Проблема «одиночного» детектора 1:07
Стандартные модели обнаружения объектов, такие как Faster R-CNN, анализируют изображение изолированно. Это создает сложности при работе с камерами, установленными на длительный срок:
- Нерегулярная частота кадров: Фотоловушки часто срабатывают на движение, создавая «всплески» активности и длительные периоды бездействия.
- Искажение условий: Освещение или частичное перекрытие объекта (окклюзия) может сбить с толку обычный детектор, классифицируя, например, животное как случайный шум или другой объект.
- Ограниченность данных: Одиночный кадр не учитывает, что камера снимает одни и те же локации, где объекты (животные, транспорт) имеют предсказуемые маршруты или поведение,.
Архитектура: как работает Context R-CNN 6:50
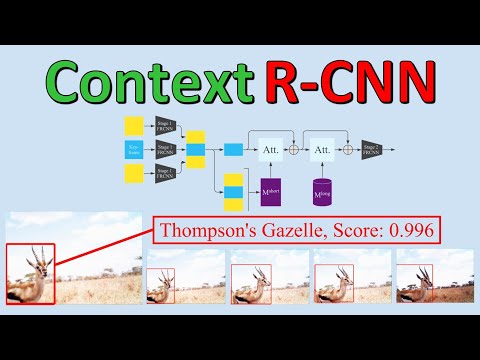
Модель «вклинивается» в стандартный двухэтапный детектор (например, Faster R-CNN), дополняя его механизмом памяти.
- Этап 1 (Feature Extraction): Извлечение регионов интереса (ROI) и векторов признаков из текущего кадра.
- Блок памяти (Contextual Enhancement): В этот промежуточный этап подаются признаки из памяти.
- Этап 2 (Classification): Финальная классификация объекта с учетом обогащенных данных.
Уровни памяти
- Краткосрочная память: Охватывает несколько кадров вокруг текущего (ключевого) изображения. Помогает, когда животное немного сдвинулось или изменило угол обзора.
- Долгосрочная память: Использует данные за часы, недели или даже месяцы. Здесь признаки извлекаются с помощью предопределенного (pre-trained) экстрактора, так как обучение на таком объеме данных end-to-end было бы вычислительно невозможным,.
Роль механизма внимания 13:19
Для того чтобы «выбрать» нужную информацию из гигантского объема памяти, используется стандартный механизм внимания (attention mechanism), аналогичный трансформерам.
- Запросы и ключи: Текущий кадр создает «запрос» на поиск нужной информации, а признаки из банка памяти выступают в роли «ключей».
- Взвешивание: Система оценивает, какие кадры из прошлого наиболее релевантны для текущей сцены, и объединяет их данные с текущим кадром.
По словам Янника Кильхера, визуализация весов внимания показывает, что модель действительно «учится» отслеживать регулярные маршруты объектов. Например, при распознавании бородавочника или газели модель активно «подтягивает» признаки из других кадров, где эти же животные появлялись в течение месяца.
Результаты и нюансы эффективности 20:15
Context R-CNN заметно превосходит «одиночные» модели на специализированных датасетах (Wildlife, Street cam). Интересно, что чем длиннее временной горизонт памяти (от минут до месяцев), тем выше точность — это доказывает, что модель действительно извлекает пользу из объема исторических данных, а не просто переобучается.
Ошибки и «сверхспособности» модели
- Ложные срабатывания: При высоком уровне уверенности модель может совершить ошибку (например, приняв дерево за жирафа) и «размножить» её на другие кадры, так как агрегирует информацию со всех снимков.
- Превосходство над человеком: В анализе самых «уверенных» ошибок модели выяснилось, что в 97 из 100 случаев модель была права, а человек-разметчик — нет, пропустив животных на кадрах.
Таким образом, добавление контекста позволяет системе видеть то, что скрыто в тенях, окклюзиях или при плохом освещении, делая её незаменимым инструментом для мониторинга дикой природы и городской инфраструктуры.