В видеообзоре известного исследователя машинного обучения Янника Килчера (Yannic Kilcher) подробно разбирается научная работа «PonderNet: Learning to Ponder», авторами которой являются Андреа Банино, Ян Балагер и Чарльз Бланделл из DeepMind. Ключевая идея статьи заключается в создании рекуррентной архитектуры нейросетей, способной динамически адаптировать объём вычислений в зависимости от сложности конкретной задачи. Этот подход позволяет искусственному интеллекту «задумываться» над трудными примерами и давать мгновенный ответ на простые, кардинально меняя привычный взгляд на вычислительные ограничения глубокого обучения.
🧠 Проблема фиксированных вычислений в нейросетях 0:00
В стандартных глубоких нейросетях объём вычислений жестко привязан к размеру входных данных, но никак не зависит от сложности решаемой проблемы. Будь то полносвязная сеть или сверточная архитектура, фиксированный прямой проход (forward pass) выполняет один и тот же объем математических операций для любого примера. Полносвязная сеть последовательно переходит от слоя к слою, а в традиционных рекуррентных нейросетях (RNN) один и тот же слой циклически обрабатывает новые поступающие токены, сохраняя неизменную вычислительную стоимость одного шага.
В качестве примера сложной для ИИ алгоритмической задачи Янник Килчер приводит «задачу на чётность» (parity problem). Сети подается строка из нулей и единиц, а на выходе требуется определить, является ли общее количество единиц четным или нечетным. Для человека или классического алгоритма это тривиальный пошаговый процесс:
- Посмотреть на первые элементы.
- Объединить их промежуточным итогом.
- Повторить операцию для оставшейся части строки.
Однако стандартные нейросети, демонстрирующие феноменальные успехи в распознавании образов или речи, с трудом справляются с подобными базовыми алгоритмами. Им не хватает динамики: если в строке всего одна единица, ответ можно дать мгновенно, но если строка длинная и запутанная, системе необходимо время на «размышление». PonderNet создана для преодоления этого барьера, позволяя сети самостоятельно определять число шагов для каждого конкретного примера прямо в процессе инференса.
🛠️ Архитектура PonderNet: как заставить сеть «думать» 8:10
Архитектура PonderNet представляет собой рекуррентную структуру, где базовым элементом выступает так называемая пошаговая функция (step function). Внутрь этой функции разработчик может поместить любую привычную архитектуру — например, сверточную сеть (CNN) или блок долгосрочной краткосрочной памяти (LSTM).
Процесс вычислений строится по следующей схеме:
- Входной вектор $x$ преобразуется кодировщиком в начальное скрытое состояние $h_1$.
- На каждом шаге $n$ пошаговая функция принимает текущее скрытое состояние $h_n$ и выдает три значения: следующее скрытое состояние $h_{n+1}$, потенциальный вариант ответа $y_n$ и условную вероятность остановки $\lambda_n$.
- Параметр $\lambda_n$ лежит в строго диапазоне от $0$ до $1$ и отражает уверенность сети в том, что вычисления пора прекратить.
Важнейшим нововведением PonderNet стало то, что узел остановки предсказывает вероятность прекращения вычислений при условии, что сеть не остановилась на предыдущих шагах. На основе этих условных вероятностей рассчитывается абсолютная вероятность $p_n$ того, что сеть выберет ответ именно на шаге $n$:
$$p_n = \lambda_n \prod_{i=1}^{n-1} (1 - \lambda_i)$$
Подобная схема математически эквивалентна дереву решений, где на каждом этапе сеть выбирает: завершить работу или продолжить вычисления. На этапе инференса (работы готовой модели) этот выбор реализуется вероятностным сэмплированием. Сеть подбрасывает смещенную монету с вероятностью успеха, равной текущему значению $\lambda_n$. Если выпадает «орел», сеть мгновенно возвращает ответ $y_n$, не тратя ресурсы на последующие шаги вычислений.
⚖️ Особенности функции потерь и обучения 15:31
В процессе обучения PonderNet разворачивается (unroll) на фиксированное количество шагов вперед, независимо от промежуточных значений вероятностей остановки. Главное отличие PonderNet от предыдущих аналогичных подходов, таких как механизм ACT (Adaptive Computation Time) от Алекса Грейвса, кроется в интерпретации итогового ответа модели. В архитектуре ACT финальный выход сети формируется как средневзвешенная сумма результатов всех шагов вычислений. PonderNet действует иначе: предполагается, что сеть выберет ровно один, вполне конкретный шаг для ответа.
Чтобы обучить такую систему сквозным методом (end-to-end), авторы формируют функцию потерь как математическое ожидание ошибки. Для этого ошибка каждого отдельного шага умножается на абсолютную вероятность $p_n$ того, что сеть остановится именно на этом шаге.
При обратном распространении ошибки (backpropagation) градиентный сигнал идет по двум разным направлениям одновременно:
- Вектор $y_n$ корректируется, чтобы делать вычисляемые ответы более точными.
- Параметр $\lambda_n$ настраивается, чтобы сеть лучше понимала, в какой момент ее ответ оптимален, а когда стоит продолжить вычисления.
Янник Килчер выражает личное опасение, что такое разделение градиента может приводить к нестабильности обучения. По его мнению, если задача формирования правильного ответа $y_n$ слишком сложна (например, генерация целой карты пикселей), сети может быть проще искусственно занизить вероятность остановки на ранних шагах, вместо того чтобы пытаться оптимизировать сам ответ. Автор предполагает, что стабильная работа PonderNet во многом зависит от баланса информационной сложности между узлом ответа и узлом остановки.
Для предотвращения бесконечного затягивания вычислений в функцию потерь добавлен регуляризатор — дивергенция Кульбака — Лейблера ($KL$-дивергенция). Она штрафует отклонение предсказанного сетью распределения шагов от априорного геометрического распределения с заданным гиперпараметром $\lambda_p$. Этот параметр задает для сети «ожидаемое по умолчанию» количество шагов. К примеру, если установить $\lambda_p = 0.1$, это станет для модели мягким указанием, что на каждом шаге существует базовый 10%-й шанс на остановку.
📊 Эксперименты: решение задачи на чётность и экстраполяция 27:37
Эффективность PonderNet проверялась на специализированных синтетических задачах, где критически важна динамика вычислений. Модель напрямую сравнивали с алгоритмом ACT.
В задаче на чётность модель обучали на строках длиной от 1 до 49 элементов. Основной целью авторов было проверить способность сети к экстраполяции — то есть к решению аналогичной задачи на данных большей длины (от 50 до 99 элементов), которые модель никогда не видела в процессе обучения.
Результаты тестирования показали явное превосходство нового подхода:
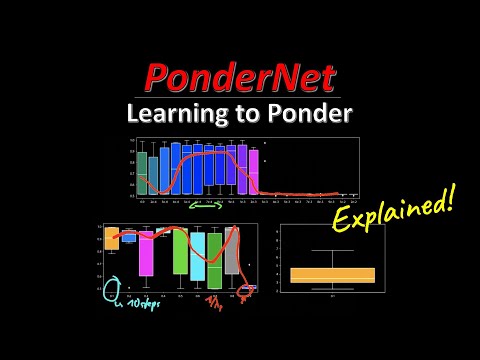
- Точность (Accuracy): На этапе экстраполяции точность модели ACT упала до уровня 0.5, что при бинарном выборе (четное/нечетное) эквивалентно случайному угадыванию. PonderNet сохранила высокую точность на уровне около 0.9.
- Динамика вычислений: При работе со строками базовой длины (до 49 элементов) PonderNet выполняла в среднем около 3 вычислительных шагов. Однако при переходе к длинным строкам на этапе экстраполяции сеть самостоятельно увеличила количество шагов «размышления» до 5.
Янник Килчер предполагает, что такой успех связан со способностью PonderNet выстраивать иерархическую структуру решения. Модель учится преобразовывать части строк в промежуточные ответы, а на дополнительных шагах объединяет их в единый финальный результат. Предыдущие же модели (ACT) оказались менее динамичными, так как их метод взвешенного суммирования заставлял ранние слои подстраиваться под потенциальные будущие вычисления, лишая их гибкости.
⚙️ Устойчивость к гиперпараметрам и практическое значение 37:01
Помимо точности, PonderNet продемонстрировала высокую устойчивость к настройке гиперпараметров по сравнению с предшественниками. В модели ACT критически важный параметр регуляризации $\tau$ не имеет интуитивной интерпретации, и сеть работает адекватно только в крайне узком диапазоне его значений (около $5 \cdot 10^{-4}$). Малейшее отклонение приводит к полной потере работоспособности модели.
В PonderNet параметр $\lambda_p$ выражает реальную вероятность и строго ограничен диапазоном от 0 до 1. Математическое ожидание количества шагов рассчитывается как $1/\lambda_p$. Эксперименты показали, что даже если установить жесткий приор на выполнение 10 шагов ($\lambda_p = 0.1$), в процессе обучения сеть все равно адаптируется и снижает реальное число шагов до оптимальных 3–5. Это доказывает, что модель устойчива к неидеальному выбору начальных настроек и не требует агрессивной регуляризации для достижения хорошего результата.
В финальной части обзора Янник Килчер отмечает высокое качество раздела статьи, посвященного общему влиянию работы (broader impact statement). По его словам, авторы ушли от стандартных современных клише конференций и честно описали техническую ценность метода. Переход от статических плоских отображений к гибким архитектурам, имитирующим пошаговые алгоритмы, открывает огромные перспективы для ИИ. Динамическая экономия вычислительных ресурсов делает подобные модели идеальным решением для развертывания на устройствах с ограниченными мощностями, включая обычные мобильные телефоны.




