На пути к доверенному робототехническому взаимодействию с человеком 4:21
Современные автономные системы все глубже проникают в повседневную жизнь, от беспилотных автомобилей до складских роботов и домашних помощников. В своей лекции в Stanford Online исследовательница подчеркивает необходимость перехода от «задачно-центричного» к «человеко-центричному» подходу в робототехнике. Вместо того чтобы рассматривать людей как помеху, инженерам следует учить роботов воспринимать человека как партнера, с которым нужно совместно выполнять задачи. Основное внимание в работе уделено двум критическим аспектам: планированию с учетом взаимодействия и безопасному управлению.
🛡 Безопасное управление: где провести черту? 5:47
Главный вызов при создании безопасных систем заключается в определении границ допустимого сближения: «Насколько близко — это слишком близко?». В плотном потоке, например, на университетской площади, требование сохранять дистанцию в 2 метра сделает движение робота невозможным.
Проблема усугубляется тем, что у разных стейкхолдеров существуют различные определения безопасности. В литературе представлено множество стратегий:
- Velocity Obstacles (препятствия на основе скоростей).
- Contingency planning (планирование действий на случай чрезвычайных ситуаций).
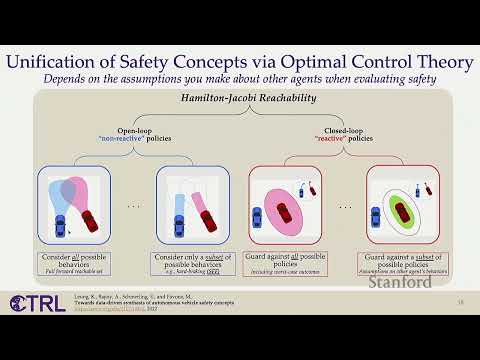
- Hamilton-Jacobi reachability (анализ достижимости).
- Safety Force Field (от NVIDIA).
- Responsibility-Sensitive Safety (от MobileEye).
Для систематизации подходов исследовательница вводит понятие «концепции безопасности» (safety concept), которая математически определяет уровень безопасности системы и указывает, какие действия являются допустимыми.
📉 Обучение безопасности на данных 15:10
Чтобы избежать консервативных предположений (например, что все участники движения могут совершать любые случайные маневры), авторы предлагают использовать данные о реальном поведении людей.
Использование функций барьерного управления (Control Barrier Functions, CBF) позволяет:
- Определить «контроль-инвариантные множества» — области состояний, внутри которых система может находиться неопределенно долго без столкновений.
- Настроить алгоритм так, чтобы робот замедлялся при приближении к границе опасной зоны.
- Через обучение с использованием градиентного спуска определять оптимальные параметры системы на основе данных.
Исследование показало, что такой метод позволяет получать более практичные и точные границы безопасности, чем при «худшем сценарии» или излишне оптимистичных допущениях. Кроме того, внедрение функции распределения ответственности (responsibility allocation function) позволяет анализировать обстоятельства аварий, понимая, кто из участников и в какой момент должен был предпринять меры для предотвращения инцидента.
🤝 Планирование с учетом взаимодействия 28:17
Вторая часть работы посвящена тому, как сделать взаимодействие между человеком и роботом естественным без явной коммуникации. Гипотеза автора заключается в том, что люди инстинктивно избегают столкновений (самосохранение).
Для реализации этого в алгоритмах предлагается внести два ключевых изменения в стандартное траекторное планирование:
- Легибельность (legibility): движение робота должно четко передавать его намерение.
- Проактивность (proactivity): робот должен совершать корректирующие маневры заблаговременно, предоставляя человеку пространство для маневра.
Для баланса вежливости робота вводится понятие «неудобства» (inconvenience), которое ограничивает отклонение от идеальной траектории. Добавление «фактора наценки» (markup factor) заставляет систему раньше и активнее реагировать на приближение других объектов, что исключает осцилляции (колебания), часто возникающие у стандартных моделей при попытке разойтись в узком коридоре.
🚀 Будущее и текущие вызовы 45:18
На данный момент исследовательница совместно со своим аспирантом работает над интеграцией функций барьерного и ляпуновского управления с диффузионными моделями для генерации траекторий. Предварительные результаты показывают, что это позволяет роботам успешно перемещаться среди пешеходов, тогда как стандартные методы (например, квадратичное программирование) часто приводят к паническим маневрам или столкновениям.
Основные вызовы, стоящие перед областью:
- Сбор данных: необходимо создавать датасеты с критическими сценариями, а не просто записывать повседневное движение.
- Вычислительная сложность: методы анализа достижимости страдают от «проклятия размерности» при усложнении систем.
- Метрики: разработка стандартов для оценки «естественности» взаимодействия человека и робота остается сложной задачей.