В области искусственного интеллекта эффективное обучение агентов в сложных трехмерных средах долгое время ограничивалось вычислительными мощностями одиночных машин. Исследователь и блогер Янник Килхер (Yannic Kilcher) представил детальный разбор архитектуры IMPALA, созданной для масштабируемого распределенного глубокого обучения с подкреплением. Эта технология предлагает изящное математическое решение проблемы рассинхронизации данных при параллельной работе множества вычислительных узлов.
🎮 Среда DeepMind Lab и основы обучения с подкреплением 0:00
Разбор новой архитектуры распределенного глубокого обучения с подкреплением (Deep RL) начинается с демонстрации сложной тестовой платформы. Для оценки возможностей современных алгоритмов используется трехмерная среда DeepMind Lab. Она представляет собой комплекс разнообразных задач, включая прохождение лабиринтов, сбор игровых объектов (например, яблок) и платформеры, где агенту необходимо перемещаться по сложным элементам локации.
Агент в этой среде воспринимает мир через пиксели виртуальной камеры и получает награды за выполнение правильных действий. Его возможности ограничены фиксированным набором команд:
- Перемещение вперед и назад.
- Прыжки и приседания.
- Вращение виртуальной камеры для осмотра пространства.
Для успешного прохождения таких сред классически применяется алгоритм Advantage Actor-Critic (A2C). Его работа базируется на взаимодействии двух ключевых компонентов — политики ($\pi$) и функции ценности ($V$). Функция политики ($\pi$) принимает текущее состояние среды на определенном шаге и выдает распределение вероятностей для доступных действий, подсказывая, какой шаг наиболее перспективен в данный момент. Функция ценности ($V$), в свою очередь, оценивает общую привлекательность текущего состояния среды в виде конкретного числового значения.
Ведущий приводит наглядный пример с лабиринтом, вид на который открывается сверху. Если агент находится в непосредственной близости от цели, функция ценности присвоит этому состоянию очень высокий балл. Если же агент заходит в тупик или удаляется от цели, ценность состояния резко падает. В алгоритме A2C эти две функции непрерывно обучают друг друга, создавая сбалансированную систему принятия решений.
🔄 Проблема синхронизации в классическом подходе A2C 5:42
Несмотря на свою успешность, классический алгоритм A2C имеет серьезное архитектурное ограничение, связанное с так называемым обучением «в рамках текущей стратегии» (on-policy learning). В стандартной схеме процесс жестко синхронизирован: агент совершает серию шагов внутри эпизода, собирает данные, а затем полностью останавливает симуляцию среды для проведения шага обновления нейросети. Только после завершения оптимизации весов запускаются новые тренировочные эпизоды.
Для корректной работы A2C критически важно, чтобы все обучающие шаги рассчитывались на основе самой актуальной версии нейросети агента. Взаимодействие выглядит как закрытый цикл:
- Агент анализирует состояние среды через нейросеть.
- Совершается действие, и среда возвращает новые наблюдения.
- Данные накапливаются до тех пор, пока не обновится глобальная политика.
Подобная привязка к жесткой последовательности делает невозможной эффективную децентрализацию вычислений. Процессор или видеокарта вынуждены простаивать, пока генерируются новые шаги симуляции, что существенно замедляет общее время обучения сложных моделей.
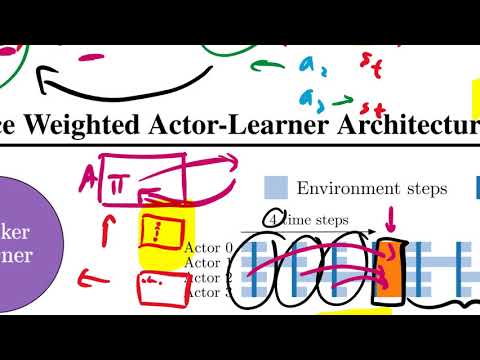
🏗️ Архитектура IMPALA: Разделение на акторов и ученика 7:58
Архитектура IMPALA радикально меняет этот подход, разделяя обязанности между множеством независимых вычислительных узлов. Система больше не ждет завершения каждого шага симуляции. Вместо этого вся структура делится на два типа сущностей:
- Акторы (Actors) — независимые рабочие потоки или машины, которые генерируют игровой опыт.
- Ученик (Learner) — центральный узел, который непрерывно оптимизирует общую модель.
В рамках этой топологии акторы автономно запускают эпизоды в среде, не прерывая работу других компонентов. Они собирают полученный опыт в пакеты и передают их по сети центральному ученику. Ученик принимает эти траектории от всех акторов одновременно и выполняет шаги обучения один за другим в максимально быстром темпе.
Периодически акторы синхронизируют параметры своей локальной сети с центральным учеником. Поскольку этот процесс происходит асинхронно через сеть, ученик успевает обновить глобальные веса модели многократно, пока отдельный актор собирает данные внутри своего изолированного эпизода. Это полностью снимает проблему простоев оборудования, но порождает серьезный теоретический вызов.
🧮 Математическое ядро: Коррекция V-trace 9:40
Главный теоретический вклад авторов IMPALA заключается в решении проблемы устаревших данных. Из-за асинхронности актор собирает траектории, используя старую копию политики ($\mu$), в то время как центральный ученик уже работает с обновленной политикой ($\pi$). Прямое обучение на таких «отклоняющихся» данных (off-policy) без корректировки разрушило бы стабильность модели.
Для компенсации этого разрыва применяется алгоритм V-trace. Он формирует специальные целевые значения (V-trace targets) для обучения функции ценности. В основе формулы лежит добавление к текущему значению функции ценности взвешенной суммы будущих временных разностей ($\delta$) с учетом коэффициента дисконтирования. На самом глубоком уровне алгоритм вычисляет отношение вероятностей действий в текущей политике ученика ($\pi$) к их вероятностям в старой политике актора ($\mu$). Это отношение жестко ограничивается сверху константой (обычно равной 1).
Ведущий иллюстрирует логику работы коррекции на примере лабиринта:
- Актор со старыми весами ($\mu$) считает, что движение вперед — это отличный выбор.
- Ученик за это время успел обновить глобальную модель ($\pi$) и «узнал», что впереди находится стена, поэтому двигаться нужно в другую сторону.
- Поскольку значение $\pi$ для этого действия теперь низкое, а $\mu$ было высоким, итоговый коэффициент отношения падает.
Таким образом, алгоритм автоматически занижает вес тех участков траектории, где старая стратегия актора слишком сильно разошлась с актуальными знаниями ученика. По мнению Янника Килхера, это не просто удачная эвристика — авторы математически доказали, что при совпадении политик ($\mu = \pi$) алгоритм гарантированно сводится к классическим каноническим методам обучения с подкреплением.
📈 Оптимизация функций и результаты тестов 17:07
Итоговый процесс обучения в IMPALA включает одновременное обновление нескольких компонентов. Функция ценности настраивается через градиентный спуск с использованием целевых значений V-trace. Параллельно обновляется функция политики в стиле классического алгоритма REINFORCE, где градиент масштабируется на величину награды и целевого показателя V-trace.
Важным элементом формулы является штраф за энтропию (entropy penalty). Он искусственно подталкивает энтропию политики вверх, заставляя агента сохранять склонность к исследованию среды (exploration), вместо того чтобы преждевременно застревать на эксплуатации уже известных путей (exploitation).
Эффективность подхода проверялась на платформе DeepMind Lab с использованием двух вариантов архитектуры нейросети — малой (small) и большой (large). Результаты тестов показали колоссальное преимущество:
- На одной машине IMPALA обрабатывает значительно больше кадров в секунду (FPS), чем алгоритм A3C.
- В распределенной среде масштабирование демонстрирует практически линейный рост производительности.
- Все вычислительные узлы работают на максимальной скорости без взаимных задержек благодаря математической коррекции V-trace.
Анализ графиков реального времени (wall-clock time) подтверждает, что варианты IMPALA достигают высоких игровых результатов в разы быстрее, чем классический алгоритм A3C. Для желающих самостоятельно протестировать данную архитектуру Янник Килхер отметил важный нюанс: в репозиториях на GitHub проект опубликован не под именем «Impala», а под названием «scalable_agent». Полный текст исследования снабжен объемным математическим приложением с доказательствами стабильности алгоритма.