Основы Q-Learning: как ИИ учится принимать решения 0:00
Q-Learning — это фундаментальный алгоритм обучения с подкреплением (Reinforcement Learning), который позволяет агенту научиться выбирать оптимальные действия в среде для максимизации долгосрочной награды. По мнению Янника Килчера, именно этот подход, наряду с Deep Mind, сыграл ключевую роль в прорыве алгоритмов обучения с подкреплением, продемонстрировав, как ИИ может самостоятельно освоить игры Atari, опираясь лишь на пиксели на экране и получаемые очки.
🤖 Базовая архитектура reinforcement learning 1:05
В основе обучения с подкреплением лежит циклический процесс взаимодействия между агентом и средой:
- Агент получает текущее состояние (наблюдение) среды.
- На основе этого состояния агент совершает действие.
- Среда реагирует: выдает награду (или штраф) и переводит агента в новое состояние.
Янник Килчер отмечает, что главной проблемой здесь является «назначение кредита» (credit assignment). В таких играх, как шахматы, агент не получает промежуточных наград за каждый ход — он узнает о победе или поражении только в самом конце. Задача Q-функции — «объяснить» системе, какой из сделанных шагов был действительно правильным и привел к итоговому успеху.
🧠 Что такое Q-функция и как она работает 7:36
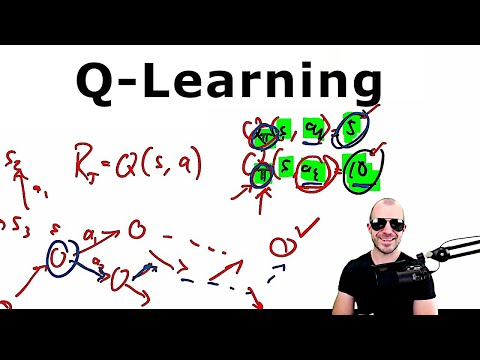
Q-функция — это инструмент оценки действий. Она принимает на вход текущее состояние $s$ и предлагаемое действие $a$, после чего выдает число — прогнозируемую сумму всех будущих наград.
- Функция политики (Pi, $\pi$): Это стратегия агента, определяющая, какое действие совершить в каждом состоянии.
- Оптимальная политика: Агент стремится выбрать такую политику, при которой в любом состоянии он всегда выбирает действие, максимизирующее результат Q-функции.
По словам Килчера, важно учитывать дисконтирующий множитель ($\gamma$): поскольку награды в далеком будущем менее ценны для агента в моменте, чем мгновенные, система использует этот коэффициент для балансировки ожиданий.
📉 Уравнение Беллмана и обучение 19:32
Фундамент Q-Learning строится на рекуррентном уравнении Беллмана. Оно гласит, что значение Q для текущего состояния и действия равно немедленной награде плюс дисконтированная ценность Q для следующего состояния.
Поскольку идеальную Q-функцию изначально никто не знает, алгоритм использует «саморегрессию»:
- Агент начинает с инициализации случайных значений Q.
- В процессе взаимодействия со средой он сравнивает полученный результат (реальная награда + оценка следующего состояния) с текущим предсказанием.
- Разница между ними используется для коррекции модели через градиентный спуск, делая предсказания всё более точными.
🕹️ От таблиц к нейросетям 34:19
В простых средах можно использовать табличный Q-Learning, где для каждой пары «состояние-действие» хранится значение в ячейке. Однако для сложных задач, таких как игры Atari, где количество состояний огромно, применяются глубокие нейронные сети (Deep Q-Learning).
Нейросеть принимает на вход состояние (например, картинку) и выдает оценки для всех возможных действий. Килчер подчеркивает важность метода Experience Replay — буфера памяти, куда сохраняются переходы (состояние, действие, награда, следующее состояние) для повторного обучения, что делает процесс более стабильным.
Несмотря на популярность спекуляций вокруг алгоритма Q* от OpenAI, Янник Килчер призывает помнить, что рассмотренные принципы Q-Learning являются классикой машинного обучения и могут иметь или не иметь отношения к новейшим разработкам компании.