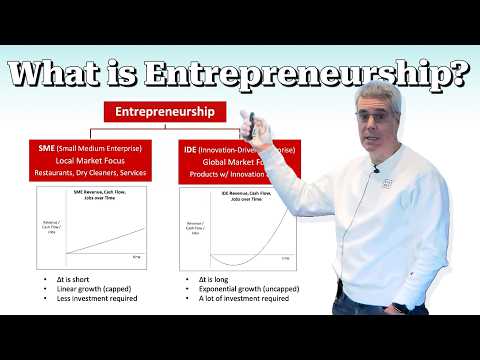
Роботы будущего не должны быть идеальными машинами, слепо исполняющими команды: чтобы эффективно взаимодействовать с миром, им нужно научиться использовать физику естественной среды вместо борьбы с ней. Расс Тедрейк, профессор MIT и эксперт в области динамических систем, переосмысливает саму суть робототехники, предлагая заменить жесткий контроль «соавторством» с гравитацией и геометрией окружающего пространства.
🚶 Пассивная динамика и искусство походки 4:25
Расс Тедрейк убежден, что наиболее красивое движение в робототехнике демонстрируют так называемые пассивные динамические шагоходы (passive dynamic walkers). Эти машины, ярким примером которых стали роботы, созданные Стивом Коллинзом и Энди Руиной в Корнеллском университете, по сути, представляют собой «сложное воплощение идеи слинки». Устройство не требует контроллеров или батарей: его достаточно поместить на небольшой наклон, чтобы оно под воздействием гравитации начало совершать движения, поразительно напоминающие человеческую походку.
В основе этого принципа лежит физика, подобная движению безримного колеса: при каждом шаге система теряет энергию при соприкосновении с поверхностью и приобретает её при движении вперед, приходя в состояние стабильной периодической динамики. Хотя современные инженерные шедевры, такие как Asimo от Honda, визуально сложны, они часто выглядят «осторожными», словно робот передвигается по раскаленным углям. Тедрейк подчеркивает: создание таких машин — это баланс между научным расчетом и искусством, где успех часто зависит от множества тонких инженерных уловок, таких как правильная настройка прилипания коленных механизмов.
🐟 Энергоэффективность: уроки природы 9:50
Вопрос энергоэффективности роботов тесно связан с наблюдением за биологическими системами. Исследования Джорджа Лаутера из Гарварда и Майка Транифило из MIT на примере радужной форели показали, как животные экономят силы, используя завихрения воды. Форель, плывущая против течения, умеет «серфить» между вихрями, создаваемыми камнями, меняя свой привычный стиль плавания на более эффективный.
Самый показательный эксперимент заключался в том, что даже мертвая рыба, закрепленная за камнем, начинала двигаться вверх по течению, просто резонируя с вихревым потоком. Этот пример доказывает, что механика тела может быть не менее важной, чем активность мозга, и наводит на мысль, что сама эволюция благоприятствует системам, которые работают в гармонии с физикой окружающей среды, а не пытаются ей сопротивляться.
⚙️ Границы между механикой и контролем 13:35
С точки зрения Расса Тедрейка, современная робототехника слишком жестко разделяет механику и управление. Вместо того чтобы пытаться с помощью моторов «стирать» естественную динамику мира и навязывать роботу искусственные, математически простые движения, разработчикам стоит позволить физике делать большую часть работы.
Активный контроль (команды моторам) должен лишь слегка дополнять энергию системы, а не полностью подменять собой её физическую природу. Расс отмечает, что даже человеческий организм постоянно меняется: к примеру, костная структура может перестраиваться спустя годы после травмы, адаптируясь к новым условиям нагрузки. Это доказывает, что адаптация — процесс не только интеллектуальный, но и глубоко физический, зависящий от геометрии и механики тела.
🧬 Эволюция и ловушки детерминизма 15:50
Обсуждая прямохождение, Расс Тедрейк предостерегает от попыток найти одну простую «эволюционную причину» для сложных явлений, будь то человеческая диета или развитие определенных навыков. Подобные объяснения часто строятся на допущении, что мы понимаем логику эволюционного отбора, однако история часто пишется через череду случайных событий, которые в ретроспективе кажутся судьбоносными.
Ранее в разговоре они также коснулись преимуществ бега босиком, который, помимо прочего, служит отличным инструментом для обучения правильной механике движения. Тедрейк отмечает, что склонность людей придумывать детерминированные истории об эволюции — это лишь способ упростить восприятие мира, тогда как реальность гораздо сложнее и полна случайных факторов.
🏃♂️ Босоногий коммут: философия естественного бега и ментальная перезагрузка 25:25
Искусство замедления: как начать бегать босиком 25:25
Обсуждая физическую культуру и её влияние на повседневную жизнь, Расс Тедрейк делится личным опытом перехода к бегу босиком и даёт ключевой совет для новичков: самое главное — начинать максимально медленно. Распространённая ошибка опытных бегунов, привыкших к длинным дистанциям или высокой скорости, заключается в том, что они сразу же снимают обувь и мгновенно травмируют себя, пытаясь с ходу выполнить привычные объёмы работы. Самому Рассу, по его признанию, повезло: на момент начала этих экспериментов он просто не мог пробежать далеко.
Помимо полного отсутствия обуви, профессор активно использует минималистичные варианты, такие как аквасоки (aqua socks) или специальные беговые сандалии, перепробовав за долгие годы самые разные модели. Переход на такой стиль бега кардинально меняет биомеханику движений. Лекс Фридман и Расс Тедрейк подробно разбирают, как меняется походка и ощущения, когда человек избавляется от массивных кроссовок с толстой подошвой. Оказывается, немедленная обратная связь, которую тело получает через боль при ошибках, служит идеальным природным учителем для корректировки техники. Позже в беседе Расс также вскользь затронет важность строгого мышления и фундаментальной физики, но основы естественного движения закладываются именно здесь — в глубоком понимании механики собственного тела.
Стопа как манипулятор: проприоцепция и защита суставов 26:15
Человеческая стопа — это сложнейший инженерный механизм. Расс Тедрейк подчёркивает, что в нашей стопе содержится ровно столько же мышц и сенсоров, сколько и в ладони. Человечество совершает удивительные вещи с помощью рук, но при этом добровольно заковывает свои ноги в массивную жёсткую обувь, полностью блокируя входящие сигналы. Бег босиком возвращает телу проприоцепцию — способность воспринимать положение своего тела в пространстве, что позволяет мгновенно замечать и исправлять изъяны в походке и беговом шаге.
Главный страх критиков такого подхода — это порезы и острые камни. Однако Расс предлагает взглянуть на эту проблему через призму долгосрочного планирования: любая царапина или ссадина заживёт за неделю, но если бегун «убьёт» свои колени из-за неправильной техники в мягкой обуви, то с бегом будет покончено навсегда. Такой размен краткосрочного дискомфорта на долгосрочное здоровье суставов абсолютно оправдан. Со временем кожа на подошвах адаптируется, становится грубой и мозолистой, что позволяет Рассу без проблем бегать практически по любым поверхностям. Для тех, кто хочет углубиться в методологию естественного бега, профессор рекомендует книгу Кена Боба Сэкстона (Ken Bob Saxton), которая, по его мнению, лучше всего описывает правильный подход к тренировкам.
Лодка, велосипед и 12 миль до MIT: экстремальный баланс работы и жизни 28:04
Философия естественного движения Расса Тедрейка напрямую перетекает в его повседневную рутину. Его ежедневный путь до университета — это отдельный вид спорта. Расс живёт примерно в 12 милях (около 19 километров) от кампуса MIT, но всегда находит изощрённые способы добраться до работы. На протяжении многих лет он регулярно пробегал эту дистанцию босиком или в минималистичной обуви, а также преодолевал её на велосипеде. Типичный план профессора выглядел так: утренний бег до работы, а вечером — возвращение домой на велосипеде, или наоборот. В арсенале его транспортных средств в разное время были даже роликовые коньки.
В последнее время его любимым увлечением стал водный маршрут: Расс спускает небольшую вёсельную лодку в реку Чарльз недалеко от дома и плывёт до MIT. Этот путь занимает много времени, так как река сильно петляет, но для профессора оно бесценно. Окружающие часто спрашивают его, как можно оправдать такие огромные временные затраты на дорогу, на что Расс отвечает, что для него это «магическое время» для декомпрессии и размышлений. Утром он успевает сделать много работы дома, затем во время пути мысли «укладываются» в голове перед плотным графиком встреч, а на обратном пути он аналогичным образом разгружает мозг. Это позволяет сохранять удивительное дзэн-спокойствие и баланс, даже когда в реальном мире всё «горит», а роботы ломаются. Единственный случай, когда Рассу приходилось ставить рекорды скорости — это необходимость вовремя успеть в детский сад за детьми, так как там действовала строгая поминутная оплата за опоздание.
Анти-Гаггинс: концепция эффективных динамических систем без боли 31:34
Даже во время путешествий Расс Тедрейк остаётся верен своим привычкам: он доезжает на велосипеде до аэропорта Логан, складывает свой компактный байк в багаж, а по прибытии в пункт назначения передвигается только на нём. В последнее время он также берёт с собой в самолёт надувной сапборд (stand-up paddleboard), чтобы исследовать местные водоёмы. Профессор упоминает, что регулярно общается со знаменитым сверхмарафонцем Дэвидом Гаггинсом (David Goggins), чьи безумные челленджи мотивируют многих людей.
Однако подход Расса к спорту принципиально отличается от философии Гаггинса, построенной на поиске страданий и преодолении боли через силу. Расс видит себя скорее как эффективную пассивную динамическую систему — его цель заключается в том, чтобы «не оставлять боли» (leave no pain) и заканчивать тренировку в лучшем физическом состоянии, чем в её начале. С приходом пандемии COVID-19 Расс лишился своего привычного длинного коммута до работы, но адаптировался и находит радость в обычных прогулках на свежем воздухе с женой и детьми, просто чтобы побыть на природе подальше от клавиатуры.
В завершение этой части разговора Лекс и Расс начинают обсуждать красоту теории управления и строгого математического мышления. Однако детальный разбор этих научных концепций, равно как и последующие воспоминания Расса об участии его команды в знаменитом технологическом соревновании DARPA Robotics Challenge, вынесены в отдельные главы этой статьи и будут подробно раскрыты далее.
🦾 Робототехника и искусство глубокого мышления 50:30
Работа над сложными системами, такими как гуманоидные роботы, требует от инженеров не только инженерной смекалки, но и готовности к экстремальным ситуациям. Вспоминая период подготовки к Virtual Robotics Challenge, Расс Тедрейк описывает атмосферу постоянного напряжения, где грань между успехом и катастрофическим падением робота измерялась миллисекундами работы оптимизационного алгоритма. В условиях, когда симулятор работал медленнее реального времени, а требования к скорости контроллера постоянно росли, команде приходилось принимать критические решения «на лету». Одним из таких решений стала разработка сверхлегкого и быстрого слоя fastqp, который перехватывал управление в экстренных случаях. Этот опыт показал, что даже при наличии мощного оборудования, инженерам критически важно сохранять навыки формального, строгого анализа физических систем, чтобы не полагаться слепо на «черные ящики» алгоритмов.
Философия тестирования в условиях неопределенности 58:46
Расс Тедрейк подчеркивает: когда речь идет о физических роботах, классические методы тестирования сталкиваются с непреодолимым барьером — невозможностью повторить один и тот же эксперимент дважды. В то время как модульное тестирование кода остается важным этапом, системная интеграция на реальном железе требует иного подхода. Сейчас основная стратегия строится на методах Монте-Карло: исследователи запускают максимально возможное количество симуляций и попыток, пытаясь создать среду, где граничные случаи и сценарии сбоев будут проявляться как можно чаще. Однако Тедрейк признает, что именно эти «нюансы мира» — те самые редкие ситуации, которые невозможно полностью воспроизвести в виртуальной среде, — зачастую становятся причиной самых драматичных и неожиданных поломок роботов.
Контакт как фундаментальная задача 1:05:44
Одной из самых сложных проблем, с которыми сталкиваются современные гуманоиды, остается взаимодействие с окружающим миром при помощи чего-то, помимо стандартных точек контакта (например, стоп). Расс Тедрейк отмечает парадокс: большинство алгоритмов движения в робототехнике спроектированы так, чтобы избегать любого лишнего контакта, «танцуя» вокруг препятствий, в то время как люди активно используют случайные касания для достижения целей. Хотя глубокое обучение (deep learning) начинает демонстрировать впечатляющие результаты в управлении манипуляторами через контакт, способность робота быстро и интеллектуально реагировать на сложные, непредсказуемые физические взаимодействия, сравнимые с теми, что происходят в контактных видах спорта, остается труднодостижимой целью.
Обучение через структуру и иерархию 1:11:42
Размышляя о том, как люди достигают мастерства в сложных двигательных задачах, Тедрейк проводит параллель между человеческим обучением и архитектурой систем управления. Он отмечает, что мы не просто учим нейросеть «в лоб» выполнять действие — мы выстраиваем иерархию. На нижнем уровне находятся рефлексы и базовые физические модели, а выше — системы планирования, которые позволяют адаптироваться к новым ситуациям, например, использованию подручных предметов в качестве инструментов. Это «магическое» промежуточное звено, позволяющее нам эффективно масштабировать знания и переносить их на незнакомые задачи, — то, что робототехнике еще предстоит по-настоящему осознать и воплотить в своих алгоритмах.
🤖 Испытание на прочность: Роботы в реальном мире и наследие DARPA Robotics Challenge 1:15:33
Феномен робототехнических соревнований: от футбола к спасательным операциям 1:15:33
Обсуждая глобальные тренды развития современной робототехники, Лекс Фридман и Расс Тедрейк сходятся во мнении, что именно структурированные международные состязания дают инженерной индустрии самый мощный и долгосрочный импульс. Ярким примером такого влияния является RoboCup — всемирный турнир по робофутболу, который за долгие годы своего существования сформировал вокруг себя колоссальное профессиональное сообщество преданных исследователей. Проектирование все более сложных антропоморфных машин для игры на поле заставляет ученых искать нестандартные динамические решения.
Расс Тедрейк подчеркивает принципиальное различие между цифровыми успехами ИИ и физической реальностью: хотя вычислительные алгоритмы уже давно и уверенно побеждают человека в шахматах или го, в физическом пространстве машины до сих пор не могут похвастаться абсолютным превосходством над людьми. В реальном мире правила игры приходится формулировать с ювелирной точностью, поскольку прямое кинематическое столкновение с тяжелым гидравлическим гуманоидом вроде Atlas может закончиться для человека серьезной травмой. Ранее в разговоре собеседники подробно затрагивали тему страха перед антропоморфизмом и роботами Boston Dynamics, однако на соревновательной арене прагматизм инженеров полностью вытесняет эмоции. Именно этот фокус на практическом результате лег в основу главного робототехнического вызова эпохи — DARPA Robotics Challenge (DRC).
Игры по правилам: как команда MIT искала лазейки на DRC 1:18:23
Грандиозный конкурс DARPA Robotics Challenge задумывался правительством США как платформа для создания и тестирования автономных гуманоидных роботов-спасателей, способных работать в зонах жестких стихийных бедствий и техногенных катастроф. Источником вдохновения для задач конкурса послужила авария на атомной электростанции Фукусима, где человечество остро ощутило нехватку мобильных машин, приспособленных к человеческой инфраструктуре. Команда Массачусетского технологического института (MIT) под руководством Расса Тедрейка столкнулась на DRC со специфической соревновательной динамикой.
Профессор отмечает ироничную закономерность: если перед инженерами стоит задача заставить систему победить, робот никогда не будет действовать изящно или так, как это делал бы человек. Напротив, программные алгоритмы будут максимально агрессивно использовать любые пробелы в правилах, уникальные мощностные характеристики своих актуаторов и сверхскоростные контуры обратной связи. «На примере DARPA Challenge мы отчетливо увидели, что практически невозможно составить такой регламент, который кто-то из участников не попытался бы обойти ради победы», — делится воспоминаниями Расс Тедрейк.
Подготовка команды MIT требовала колоссальной работы над аппаратной выносливостью платформы. В самом начале проекта инженеры часто шутили над антропоморфным Atlas, утверждая, что для спасения от него достаточно просто побегать от машины в течение пяти минут, пока полностью не истощится заряд встроенной батареи. Тем не менее, к финальной стадии DRC разработчики значительно усовершенствовали энергосистему, увеличив время автономной работы робота до часа с лишним. Проектирование систем управления для столь тяжелых машин обнажило множество фундаментальных теоретических барьеров. Ранее в диалоге детально упоминалась сложность контроля контакта при взаимодействии с физической средой, и на DRC эта проблема вставала перед командой MIT в полный рост при решении абсолютно каждой прикладной задачи — от вождения автомобиля и открытия массивных дверей до расчистки завалов и поворота заклинивших вентилей.
Технологический оптимизм и уроки ликвидации катастроф 1:24:26
Несмотря на то, что роботы на полигонах DARPA двигались крайне медленно, а их регулярные падения становились поводом для ироничных вирусных видеороликов, Расс Тедрейк сохраняет позицию непоколебимого технологического оптимиста. Он убежден, что человечество всегда будет развивать технологии, совершать ошибки, но в конечном итоге успешно изобретать выходы из любых созданных технологических вызовов.
Практический опыт MIT на DRC наглядно доказал, что неучастие в реальных полевых тестах лишает инженеров понимания действительности, а падения и поломки — это естественная и необходимая часть эволюции робототехники. В коммерческом секторе многие амбициозные стартапы, такие как Rethink Robotics или Anki, закрываются, не сумев монетизировать свои идеи, что вызывает у Расса Тедрейка профессиональную боль, но он признает это здоровым процессом «капиталистической экологии». Бурные всплески исследовательской активности обязаны сопровождаться неудачами, если они действительно агрессивно двигают науку вперед. Профессор озвучивает важнейшую исследовательскую мантру: «Если вы добиваетесь успеха в абсолютно каждой задаче, которую пытаетесь решить, это означает лишь одно — вы выбираете недостаточно агрессивные и амбициозные цели».
Наследие жестких испытаний DARPA в конечном итоге сформировало современный рынок роботов: сегодня любой желающий или исследовательская лаборатория могут свободно купить коммерческую версию четвероногого Spot за 75 тысяч долларов. Хотя до идеальной симуляции контактного взаимодействия (которую Расс Тедрейк активно развивает в своем программном проекте Drake, о чем подробно пойдет речь в шестой главе) в те годы было еще далеко, именно прагматичные уроки DRC заложили прочный фундамент для выхода автономных гуманоидов из лабораторий в реальный мир.
🤖 Парадоксы контакта и роботы на нашей кухне 1:40:43
Математические парадоксы контакта и комбинаторный взрыв 1:40:43
Расс Тедрейк объясняет, что классическое предположение об абсолютно жёстком теле (rigid body assumption) порождает множество раздражающих парадоксов при создании симуляторов и контроллеров. Вместо привычных дифференциальных уравнений инженерам приходится иметь дело с так называемыми дифференциальными включениями (differential inclusions) — уравнениями, где конкретному состоянию системы соответствует целый набор возможных исходов. Момент физического контакта или переход от трения покоя к скольжению вызывает разрывные, скачкообразные изменения скорости. Это в корне отличается от плавных аэродинамических законов, успешно применяемых, например, при проектировании истребителей.
Главная сложность заключается в комбинаторном взрыве возможных конфигураций контакта. Расс Тедрейк иронично замечает: «Я сам антропоморфный робот, живу уже немало лет, но у меня в жизни не было времени посетить абсолютно все состояния моей системы и конфигурации контакта». Для иллюстрации он приводит пример с плоской стопой шагающего робота. Даже самая простая ходьба в двухмерной плоскости включает в себя как минимум четыре последовательные конфигурации контакта:
- Удар пяткой о поверхность (heel strike);
- Полное приземление стопы на грунт (flat foot);
- Подъем пятки перед толчком (heel up);
- Финальный отрыв носка от земли (toe off).
Если же мы перейдем к гибкой человеческой кисти, пытающейся взять бутылку воды, то попытка алгоритмически перебрать все последовательности соприкосновений пальцев с поверхностью обречена на провал. Подобные вычисления требуют принципиально иных подходов к контролю осязания.
Симуляция редких событий и «генератор чёрных лебедей» 1:51:33
Как справиться со столь высокой неопределенностью и эффективно находить критические пограничные случаи (corner cases)? Ранее в разговоре Расс Тедрейк уже упоминал опыт участия в DARPA Robotics Challenge, доказавший ценность строгой программной инженерии. Для тестирования сложных систем управления, создаваемых в том числе на базе симулятора Drake (подробнее о его архитектуре пойдет речь в следующей главе), команда профессора использует алгоритмы фальсификации, разработанные Мэттом О'Келли и Аманом Синхой.
Онь в шутку называют такую систему «генератором чёрных лебедей». Задача алгоритма — целенаправленно искать и симулировать редкие, но максимально разрушительные сценарии, выявляя скрытые уязвимости контроллеров.
Поскольку один робот физически не способен пережить все потенциальные аварии, ключевым решением проблемы нехватки данных становится концепция коллективного обучения флота (fleet learning). Это одно из важнейших направлений Исследовательского института Toyota (TRI). Вместо того чтобы полагаться на опыт одиночной машины, данные тысяч аналогичных устройств объединяются в общую сеть. Если один робот на кухне случайно уронит и разобьет тарелку, этот уникальный опыт мгновенно станет достоянием всего флота, гарантируя, что ошибка больше никогда не повторится.
Роботы в наших домах: от страха перед «Чёрным зеркалом» до помощи пожилым 1:58:51
Лекс Фридман отмечает любопытную психологическую особенность: люди с большим удовольствием наблюдают за тем, как технические системы развиваются, и готовы прощать им первоначальную «глупость», воспринимая их почти как детей. Однако цена ошибки в разных сферах кардинально отличается. Беспилотные автомобили Tesla работают в условиях, где малейший сбой может убить человека, что кратно повышает планку страха и недоверия в обществе. Домашняя робототехника — например, манипуляторы для разгрузки посудомоечной машины — в этом смысле гораздо безопаснее, хотя человеку все еще бывает трудно справиться с раздражением, когда машина ошибается.
Расс Тедрейк делится стратегическим видением робототехники в Toyota Research Institute: фокус домашних разработок направлен на то, чтобы помочь пожилым людям как можно дольше сохранять независимость и оставаться дома (концепция aging in place). Это сложнейшая социально-техническая задача: робот должен не просто выполнять механическую работу, но и деликатно поддерживать активность человека, улучшая качество его жизни.
Здесь возникает серьезный барьер восприятия, ведь старшее поколение далеко не всегда дружелюбно настроено к высоким технологиям. Тем не менее, Лекс Фридман приводит в пример собственных родителей: они не смотрели популярный сериал «Чёрное зеркало» (Black Mirror), а потому их сознание абсолютно свободно от навязанных поп-культурой научно-фантастических страхов перед восстанием машин. Для них робот — это «чистый лист» и простой утилитарный помощник. В завершение этой темы собеседники возвращаются к вопросу тактильного взаимодействия: Расс подчеркивает, что современные роботы буквально «боятся» касаться мира всей поверхностью своего тела. Преодолеть этот барьер во многом поможет мягкая робототехника, меняющая саму физику контакта, подробный разбор которой ждет читателя в финальной главе статьи.
🤖 Оптимизация и симуляция: Архитектура платформы Drake 2:05:38
Ранее в разговоре собеседники уже подробно касались тем мягкой робототехники, сложности контроля контакта и природы андер-актуированных систем. Расс Тедрейк (Russ Tedrake) указывает, что ключом к преодолению ограничений реального железа становится перенос сложных физических процессов в управляемую виртуальную среду.
Оптимизация как универсальный язык управления 2:12:00
Основная философия Расса Тедрейка при работе со сложными робототехническими системами заключается в том, чтобы позволить физике выполнять большую часть работы. Главным техническим инструментом для реализации этого подхода в его лаборатории стала математическая оптимизация. Проектирование систем принятия решений формулируется как строгая оптимизационная задача, где используется язык оптимального управления, а точнее — численного оптимального управления (numerical optimal control).
Именно под эти задачи комплексной оптимизации, планирования и расчета динамики роботов Расс Тедрейк и его команда создавали симулятор Drake. Программная симуляция позволяет эффективно сбалансировать сложнейшие уравнения движения. Хотя для управления андер-актуированными системами теоретически можно использовать и другие методы, именно численные методы оптимизации принесли наибольшие плоды в практике MIT. В долгосрочной перспективе именно эти симуляционные подходы закладываются в алгоритмы, позволяющие роботам вроде Atlas выполнять сложнейшие динамические трюки, включая сальто назад.
Проблема репрезентации состояния и контактная механика 2:14:39
Создание точной и быстрой симуляции неизбежно упирается в фундаментальный вопрос: что именно считать «состоянием» системы? Лекс Фридман (Lex Fridman) и Расс Тедрейк подробно разбирают эту проблему на примере бытовых задач. Классическая лагранжева механика предлагает строгое математическое описание физического состояния, однако при переносе в симулятор для решения реальных задач она часто приводит к вычислительному тупику.
Тедрейк описывает это на примере экспериментов по нарезке лука или моркови в лаборатории. При первом же ударе ножа объект распадается на сотню отдельных частей. Если симулятор попытается рассчитать полную лагранжеву динамику и все комбинаторные варианты контактного взаимодействия между сотней осколков, алгоритм уйдет в бесконечное вычисление, из-за чего робот застынет на месте, а «суп успеет остыть».
Поэтому современная симуляционная платформа Drake и передовые методы машинного обучения ориентируются на поиск так называемого скрытого состояния (latent state) — сжатого представления среды, которое отсекает избыточный шум и делает алгоритмы контроля вычислительно подъемными. Напомним, что ранее авторы уже упоминали контекст соревнований DARPA Robotics Challenge, где подобные вызовы для систем восприятия и симуляции стояли особенно остро.
Поиск общих принципов манипуляции 2:17:49
Тедрейк с сожалением отмечает, что многие коммерчески успешные задачи автоматизации сегодня сводятся к простому захвату и перемещению предметов (pick and place), где инженерам удается обойтись без глубокого моделирования динамики объекта. Однако настоящие вызовы для симуляционных платформ лежат в области нежестких, изменчивых сред. Профессор ставит перед разработчиками Drake задачи принципиально иного уровня: например, как научить робота завязывать шнурки — причем не на одном конкретном ботинке, а на любой обуви в мире?
Попытка заложить в контроллер бесконечномерное состояние мягких шнурков не имеет смысла. Цель создания продвинутых симуляторов — не просто ручное проектирование частного решения для одной операции, а извлечение фундаментальных принципов управления. Вскользь затрагивая темы антропоморфизма и эмоциональной связи с машинами, Тедрейк делится историей из периода соревнований DARPA, когда его команде пришлось проводить экстренную «сердечную хирургию» над роботом Atlas, буквально вытаскивая его внутренности после расплавления активной зоны.
Интеллектуальные ориентиры Расса Тедрейка 2:29:08
В завершение этой части беседы Лекс Фридман интересуется личным интеллектуальным путем профессора и просит порекомендовать книги, оказавшие на него наибольшее влияние. Тедрейк признается, что в детстве читал мало, но сейчас поглощает литературу с упоением.
Среди его ключевых рекомендаций:
-
«AI Superpowers» автора Кай-Фу Ли (Kai-Fu Lee) — выдающийся анализ глобального развития и геополитики искусственного интеллекта.
-
Труды Юваля Ноя Харари (Yuval Noah Harari) «Sapiens» и «Homo Deus», фундаментально расширяющие взгляд на развитие человечества.
-
«Черный лебедь» Нассима Талеба (Nassim Taleb) как инструмент для преодоления догматизма и понимания роли случайных событий.
-
Классический труд Мортимера Адлера «Как читать книги».
Последнюю книгу Тедрейк выделяет особо. Он подчеркивает, что сегодня, когда научное сообщество наводнено тысячами публикаций на Archive с минимальным предварительным рецензированием, умение эффективно фильтровать, структурировать и глубоко понимать тексты становится главным навыком выживания для любого исследователя.
🤖 Философия управления: андер-актуированные системы и будущее мягкой робототехники 2:30:52
Моделирование и преподавание андер-актуированных систем 2:32:52
Расс Тедрейк глубоко убежден, что преподавание сложных дисциплин — это лучший способ их подлинного освоения. Объясняя студентам в MIT принципы андер-актуированной робототехники, он вынужден делать свои теоретические выкладки абсолютно «железобетонными» перед лицом аудитории. Большинство реальных физических систем, включая человеческое тело, являются андер-актуированными, поскольку обладают меньшим количеством управляющих приводов, чем общим числом степеней свободы. Управление такими системами без грубого принудительного силового воздействия требует от инженера виртуозного понимания естественной динамики.
Вдохновляясь стилем великого популяризатора науки Айзека Азимова, Расс Тедрейк стремится к предельной ясности изложения. В эпоху цифровизации он активно ищет новые форматы взаимодействия со студентами: использование современных веб-технологий вроде WebGL позволяет транслировать трехмерный интерактивный контент прямо в браузер слушателей параллельно с лекцией в Zoom. Лекс Фридман добавляет, что в обучении критически важна плотность мысли, а грамотный видеомонтаж, убирающий лишние паузы и неотшлифованные отступления на 5–10 минут, способен превратить стандартное занятие в шедевр. Процесс такой кристаллизации знаний помогает не только тысячам аспирантов, слушающих подкаст, но и самому профессору глубже понять фундаментальные законы дефицита приводов. Расс Тедрейк сравнивает чтение классических научных трудов с романтическим диалогом, который, по мнению философа Мортимера Адлера, пересекает время и пространство между автором и читателем, позволяя избежать поверхностного синдрома упущенной выгоды (FOMO).
Математический фундамент контроля и вызовы мягкой робототехники 2:40:13
Когда Лекс Фридман задает вопрос о жизненных и профессиональных ориентирах для 20-летних людей, Расс Тедрейк настоятельно рекомендует делать упор на раннее изучение углубленной математики. В условиях современной экономики, работающей по принципу «победитель получает всё», долгосрочный успех ждет лишь тех специалистов, которые способны мыслить критически и зрить в самый корень проблемы. Как ранее в разговоре они касались важности глубокого мышления в робототехнике, Расс Тедрейк подтверждает, что инженерное дело и точные науки служат лучшим порталом для тренировки этого навыка.
Создание робототехнических платформ нового поколения — в особенности систем мягкой робототехники и сенсорики — невозможно без мощного математического бэкграунда. Использование мягких, податливых материалов позволяет эффективно распределять механическую нагрузку по всей конструкции и интегрировать гибкие тактильные сенсоры для деликатного взаимодействия с хрупкими или деформируемыми предметами. Однако платой за эту биомиметическую гибкость становится бесконечномерная среда, превращающая мягкого робота в сложнейшую андер-актуированную систему, управление которой нельзя просчитать стандартными методами жесткой робототехники.
Тедрейк советует молодым исследователям несколько фундаментальных шагов:
- Изучать углубленную математику и инженерию как можно раньше.
- Разбирать реальные физические механизмы на части и собирать их заново для понимания их сути.
- Избегать хаотичного цифрового шума в пользу долгого, концентрированного освоения больших идей.
Такой подход убережет инженеров от поверхностного серфинга по репозиториям GitHub и препринтам на Archive. Сам Лекс Фридман в качестве примера книги, сформировавшей его личное мышление, называет «Скотный двор» Джорджа Оруэлла, который глубоко отзывается в нем из-за корней в Советском Союзе.
Преодоление трудностей на пути к адаптивному тактильному контакту 2:44:29
Вспоминая ключевые вехи своей биографии, Расс Тедрейк признается, что его осознанная научная жизнь началась именно в стенах MIT. До этого он получил диплом по компьютерной инженерии в Мичиганском университете, но переезд в Бостон и совместная работа с Себастьяном Сын — выдающимся теоретическим физиком и вычислительным нейробиологом — полностью изменили его стандарты мышления. Новая академическая среда потребовала от Расса Тедрейка запредельной математической строгости.
Профессор с улыбкой вспоминает день, когда он одолжил книгу в кабинете своего руководителя, спустился к реке Чарльз и внезапно осознал, что жесткая наука буквально «бьет его наотмашь». Тем не менее, у него никогда не возникало мысли бросить начатое, ведь постоянное обнаружение зон своего незнания и сборка этого интеллектуального пазла — лучшая часть его путешествия. Понимание физики контакта и распределения давлений через тактильные сенсоры открывает дорогу к созданию безопасных домашних роботов, о появлении которых в своем жилище мечтает Лекс Фридман.
В финале беседы Лекс Фридман приводит вдохновляющие слова астрофизика Нила Деграсса Тайсона о роли автоматизации. С точки зрения чистого ученого, для сбора данных в космосе достаточно отправить эффективных роботов, однако человеческая натура устроена так, что людям необходимо личное, пусть даже опосредованное, сопричастие с процессом великих открытий.