В современном глубоком обучении узким местом часто становится не скорость вычислений на видеокарте, а подготовка данных на центральном процессоре. Исследователи из Google Brain предложили метод Data Echoing, который позволяет «занимать» простаивающий GPU повторным использованием уже загруженных данных, что значительно ускоряет общее время обучения без существенной потери качества моделей. Популярный ИТ-обозреватель Янник Кильхер (Yannic Kilcher) разобрал статью и выразил неоднозначное отношение к представленным результатам.
🚀 Проблема «простаивающего» GPU в современных пайплайнах 0:00
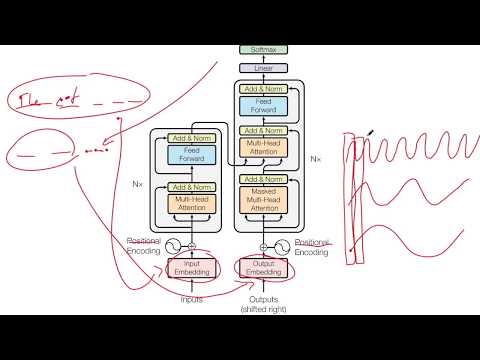
Традиционно обучение нейросетей воспринимается как единый процесс, однако на практике это сложный конвейер (pipeline) . Янник Кильхер (Yannic Kilcher) подчеркивает, что современные модели, такие как ResNet-50 на ImageNet, требуют многоступенчатой подготовки данных, которая включает в себя:
- Чтение данных из удаленных хранилищ (например, корзин AWS S3) ;
- Декодирование форматов и перевод их в тензоры (numpy или TensorFlow) ;
- Перемешивание (shuffling) для устранения предвзятости порядка хранения ;
- Аугментацию: создание множества вариаций одного изображения через обрезку, поворот, изменение яркости или отражение ;
- Группировку в мини-батчи для подачи в модель .
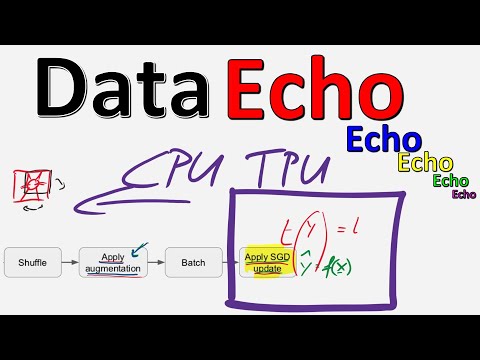
Основная техническая проблема заключается в том, что GPU и TPU становятся всё быстрее, в то время как скорость подготовки данных (обычно выполняемая на CPU) растет не так быстро . Это создает ситуацию «асимметрии», когда самая дорогая часть системы — ускоритель — простаивает (idling), ожидая, пока CPU подготовит очередной пакет данных .
🔄 Метод Data Echoing: «эхо» вместо пустоты 8:32
Суть предложенного метода Data Echoing предельно проста: если GPU готов к работе, а новые данные еще не поступили из «верхов» (upstream) пайплайна, нужно повторно использовать те данные, которые уже находятся в памяти . В систему вставляется специальный буфер повтора (repeat buffer).
По словам Янника Кильхера (Yannic Kilcher), для GPU это выглядит как поток новых батчей, хотя на самом деле это дубликаты предыдущих, возможно, прошедшие через другие трансформации . В статье исследователи используют фиксированный «коэффициент эха» (echoing factor) — число, определяющее, сколько раз каждый пример будет повторен перед тем, как будет загружен новый .
Авторы статьи выделяют три основные точки для вставки «эха»:
- После чтения и декодирования (Example echoing): данные повторяются до того, как к ним применят аугментацию .
- После аугментации: повторяются уже измененные изображения, но они всё еще могут быть по-разному перемешаны в батчах .
- После батчинга (Batch echoing): самый простой и потенциально «опасный» вариант, когда в модель подается один и тот же готовый пакет данных несколько раз подряд .
⚖️ Нарушение IID и риски переобучения 10:16
Главный теоретический аргумент против Data Echoing — нарушение предположения о независимости и одинаковой распределенности данных (IID, Independent and Identically Distributed) . Алгоритм SGD (стохастический градиентный спуск) полагается на то, что каждый новый батч дает свежую информацию о градиенте всей выборки.
Янник Кильхер (Yannic Kilcher) отмечает следующие риски:
- Повтор одних и тех же данных может сместить градиентный шаг в неверном направлении, если модель примет локальный шум в батче за общую закономерность .
- Модель может «подумать», что этот повторяющийся батч и есть весь датасет .
Однако, по мнению авторов исследования, если вставлять «эхо» достаточно рано (до аугментации и перемешивания), негативный эффект нивелируется. Каждое повторение объекта проходит через разные трансформации и попадает в батчи с разными «соседями», что делает его для модели практически «новым» .
📊 Эмпирические доказательства: от ResNet до Transformer 14:28
Для проверки своей гипотезы команда Google Brain провела тесты на пяти различных конфигурациях моделей и данных:
- Transformer на наборах LM1B и Common Crawl (языковое моделирование) ;
- ResNet-32 на CIFAR-10 ;
- ResNet-50 на ImageNet ;
- SSD (Single Shot Detector) на датасете COCO (детектирование объектов) .
Результаты показали, что Data Echoing позволяет достичь целевой точности, используя значительно меньше «свежих» (уникальных) примеров из хранилища . Например, при использовании «эха» перед аугментацией в задаче ResNet-50 на ImageNet, эффективность повторенных данных оказалась почти такой же высокой, как если бы это были абсолютно новые изображения .
Важным открытием стало то, что метод начинает работать еще эффективнее при увеличении размера батча . Когда батчи становятся слишком большими, отдельный шаг SGD перестает извлекать максимум пользы из каждого примера, и дополнительные повторения данных (микро-шаги градиента) помогают оптимизации .
🧐 Критический взгляд Янника Кильхера 15:57
Несмотря на впечатляющие графики, Янник Кильхер (Yannic Kilcher) высказывает ряд серьезных замечаний к методологии работы. Его основная претензия касается выбора целевых показателей точности .
Ведущий указывает на странности в экспериментах:
- Низкая целевая планка: точность 91% на CIFAR-10 или 76,5% на ImageNet сегодня считается довольно скромным результатом. Янник Кильхер (Yannic Kilcher) полагает, что метод может перестать работать, если пытаться достичь State-of-the-art (SOTA) показателей, где важен каждый нюанс распределения данных .
- Зависимость от батча: при увеличении батча исследователи оставляли ту же цель по точности, хотя известно, что большие батчи в языковых моделях могут позволять достигать гораздо более высокого «потолка» качества .
- Аномальные кривые: на некоторых графиках модели с Data Echoing показывают даже более высокую скорость сходимости и точность, чем базовые модели с абсолютно новыми данными, что кажется ведущему контринтуитивным .
🛠 Практические рекомендации по внедрению 33:16
Для тех, кто решит применить Data Echoing на практике, авторы предлагают несколько хитростей для улучшения стабильности обучения:
- Буферы перемешивания после «эха»: Кильхер поясняет, что использование дополнительного буфера после этапа повторения данных помогает вернуть систему к более «IID-подобному» состоянию, предотвращая идущие подряд идентичные батчи .
- Трейд-офф памяти и свежести: увеличение размера буфера перемешивания позволяет практически полностью устранить негативный эффект от повторов, хотя и требует больше оперативной памяти .
В заключение Янник Кильхер (Yannic Kilcher) резюмирует, что Data Echoing — это «no-brainer» (очевидное решение) для крупных компаний, сталкивающихся с проблемами пропускной способности сети или медленной аугментацией . Даже если теоретическая база SGD при этом слегка страдает, практическая выгода в виде сокращения времени работы дорогостоящих GPU-кластеров перевешивает риски.