Дизайн современных микрочипов — это невероятно сложная задача, напоминающая игру в «Тетрис» на стероидах, где на кону стоят миллиарды транзисторов и производительность вычислительных систем будущего. В новом видео Янник Килчер разбирает научную работу исследователей Google (Азалии Мирхосейни, Анны Голди и других), которые предложили использовать глубокое обучение с подкреплением (Deep Reinforcement Learning) для автоматизации размещения компонентов на кристалле. По мнению Килчера, эта работа не только объединяет в себе передовые методы из разных областей машинного обучения, но и делает шаг к «технологической сингулярности», когда нейросети начинают проектировать железо для самих себя.
🧩 Проблема размещения: «Тетрис» планетарного масштаба 0:28
Фундаментальная задача проектирования чипа заключается в том, чтобы оптимально расположить компоненты на пустом «холсте» (канвасе) будущего кристалла . У инженера есть так называемый «нетлист» (netlist) — список всех деталей, их размеров и, что самое важное, схема их соединений .
Основные сложности процесса:
- Огромное количество элементов: В нетлисте могут быть тысячи крупных блоков (макросов) и миллионы мелких стандартных ячеек .
- Сложная топология: Все элементы связаны между собой. Эти связи можно представить в виде огромного графа или матрицы смежности .
- Противоречивые цели: Нужно одновременно соблюсти три условия:
- Плотность: Элементы не могут перекрывать друг друга .
- Длина проводов: Чем длиннее провод, тем медленнее идет сигнал. Для максимальной скорости нужно минимизировать общую длину соединений .
- Заторы (Congestion): В определенных областях может скопиться слишком много проводов, что сделает производство невозможным .
Традиционно этим занимаются эксперты-люди в сочетании со специализированными алгоритмами. По словам Килчера, такой процесс обычно занимает несколько недель . Подход Google позволяет решить ту же задачу за несколько часов .
🤖 Агент в пустом пространстве: архитектура решения 5:42
Исследователи представили задачу размещения как последовательный процесс принятия решений, идеально подходящий для обучения с подкреплением (RL). Агент начинает с пустого холста и по очереди выставляет компоненты из списка, начиная с самых крупных .
Процесс работы RL-агента выглядит так:
- Состояние: Текущее состояние холста и список еще не размещенных компонентов.
- Действие: Агент решает, в какую именно точку сетки поставить следующий макрос .
- Пост-обработка: После того как агент разместил все крупные блоки, в дело вступает классический алгоритм — «метод силовых полей» (force-directed method). Он расставляет миллионы мелких стандартных ячеек в оставшиеся пустые пространства .
- Награда: Только в самом конце, когда чип полностью «собран», агент получает сигнал — насколько удачным получилось размещение с точки зрения длины проводов и заторов .
Янник Килчер подчеркивает, что это «крайне неприятная» (nasty) задача для обучения с подкреплением, так как награда является разреженной (sparse) . Агенту приходится совершать тысячи действий, не получая никакой обратной связи до самого финала. Более того, агент должен заранее «оставлять место» для работы стороннего алгоритма, который будет расставлять стандартные ячейки позже .
🏗️ Графовые нейросети и генеративные подходы 11:35
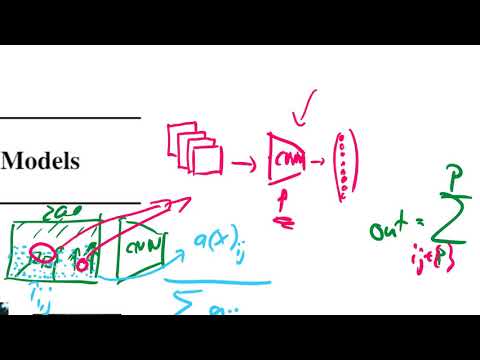
Модель, предложенная в статье, состоит из двух ключевых частей: системы кодирования состояния (encoder) и сетей политики и ценности (policy and value networks) .
Для кодирования нетлиста используются графовые сверточные нейросети (GCN) . Поскольку чип — это фактически граф, GCN позволяет передавать информацию между узлами. Килчер объясняет это так:
- Сначала вычисляются признаки ребер (связей) на основе признаков узлов (компонентов) .
- Затем признаки узлов обновляются на основе средних значений признаков прилегающих ребер .
- Этот процесс повторяется итеративно, пока информация о структуре всего чипа не «пропитает» эмбеддинги каждого элемента .
Сама политика (Policy Network) устроена необычно. Она не просто выбирает из списка действий, а генерирует своего рода карту вероятностей, похожую на изображение . Для этого используются деконволюции (D-convolutions), как в архитектурах GAN (генеративно-состязательных сетей) . Модель выдает число для каждой точки на сетке чипа: чем выше число, тем больше агент хочет поставить туда деталь . Перед принятием решения накладывается маска, запрещающая ставить блоки там, где уже что-то есть .
🧠 Трансферное обучение: от одного чипа к другому 23:06
Одним из самых впечатляющих аспектов работы Килчер называет способность модели к переносу знаний (transfer learning). Если обучить агента на одном нетлисте, он сможет быстрее и лучше проектировать совершенно другие чипы.
Ключевые выводы по трансферному обучению:
- Даже «нулевое» применение (zero-shot), когда предобученную на других задачах модель запускают на новом чипе без дообучения, дает достойные результаты .
- Обучение на наборе всего из 20 различных архитектур чипов позволяет модели крайне эффективно работать с новыми, ранее не виденными схемами .
- Это доказывает, что задачи размещения компонентов имеют общую внутреннюю логику, которую нейросеть способна уловить .
🏁 Вердикт: ИИ строит ИИ 26:44
В завершение обзора Янник Килчер отмечает, что статья Google — это пример великолепного инженерного подхода, объединяющего RL, графовые сети и генеративные архитектуры для решения реальной промышленной задачи.
По мнению Килчера, мы наблюдаем важный исторический момент: ИИ начинает проектировать специализированные ускорители для самого ИИ . В шутливой манере ведущий резюмирует, что это очередной шаг к технологической сингулярности, и «человечество обречено», так как циклы разработки железа теперь будут ускоряться сами собой за счет машинного обучения .