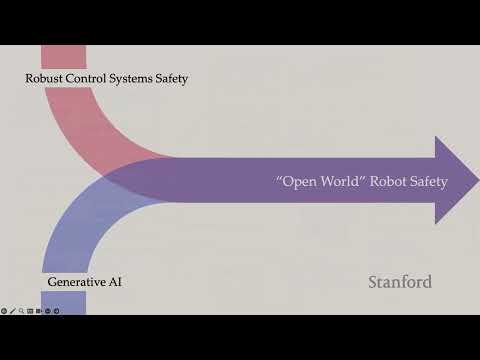
Системы управления роботами достигли впечатляющих успехов, однако до сих пор пасуют перед задачами, требующими гибкости человеческой руки. В рамках семинара в Стэнфордском университете Альберт (Albert), докторант лаборатории профессора Карен Лью (Karen Liu), представил интегративный подход, объединяющий нейросетевое обучение с классическими физическими моделями для создания по-настоящему адаптивной робототехники.
🤖 Почему «большие данные» не решили проблему манипуляции? 1:18
За последние десять лет робототехника сделала колоссальный рывок, демонстрируя трюки, которые раньше казались невозможными . Однако, по мнению Альберта, современная манипуляция далека от «решения». Текущие методы обучения с подкреплением (RL) или диффузионные политики (Diffusion Policy) страдают от отсутствия обобщающей способности (generalizability) и надежности .
Основные препятствия, которые выделяет докладчик:
- Ограниченность диффузионных политик: они требуют огромных датасетов и часто привязаны к конкретным формам объектов. Смена геометрии предмета зачастую требует переобучения модели .
- Дороговизна обучения с подкреплением: процесс настройки (tuning) RL-алгоритмов остается медленным и трудоемким, а полученные навыки часто ограничены одной средой или объектом .
Альберт утверждает, что корень проблемы — в сложнейших физических ограничениях, которые управляют манипуляцией. В отличие от навигации роботов, манипуляция сталкивается с невыпуклыми (non-convex) и гибридными динамическими системами .
Три кита физических ограничений
Спикер выделяет три ключевых категории ограничений, которые необходимо учитывать:
- Кинематика: коллизии (столкновения) и достижимость. Это геометрические ограничения, зависящие от формы робота и объекта .
- Контактные моды: описание конфигурации контактов между роботом, объектом и окружающей средой. Изменение контакта мгновенно меняет динамику системы .
- Силовое замыкание (Force Closure) и конус трения: критические условия для удержания объекта многопалой рукой. Если сумма внешних сил и моментов не равна нулю, захват сорвется .
🖐️ Проект 1: Ловкий захват (Dexterous Grasping) 8:29
Захват многопалой кистью на порядок сложнее, чем обычным параллельным гриппером. У четырехпалой руки более 20 степеней свободы против 7 у стандартного захвата . В этом проекте команда Альберта предложила гибридный конвейер:
- Offline-генерация данных: используя аналитические модели, ученые создали базу данных «правильных» захватов.
- Генеративная модель: на основе этих данных обучена CVAE (условный вариационный автоэнкодер), которая предсказывает точки контакта пальцев на объекте .
- Локальная оптимизация: если предсказание нейросети не идеально (например, силы не уравновешены), запускается быстрый алгоритм уточнения. Он «подправляет» положение пальцев, чтобы удовлетворить условиям конуса трения и силового замыкания .
В ходе испытаний система показала почти 90% успеха на 20 различных объектах, включая те, что робот никогда не видел во время обучения . Спикер подчеркивает, что нейросеть дает «хорошую догадку» (initial guess), а физическая модель доводит ее до совершенства .
📚 Проект 2: Предварительный захват (Pre-grasping) 12:35
В реальной жизни предметы редко лежат удобно. Они могут быть прижаты к стене или лежать в куче, что делает прямой захват невозможным. Здесь вступает в дело «предварительный захват» — манипуляция объектом для приведения его в удобную позу (например, выдвигание книги с полки пальцем) .
Сложность в том, что «хороший предварительный захват» определяется тем, приведет ли он в итоге к успешному конечному захвату. Это создает вычислительно дорогую цепочку планирования .
Решение команды:
- Функция оценки (Score Function): нейросеть обучается предсказывать перспективность промежуточной позы объекта .
- Граф контактных состояний: строится граф возможных перемещений пальцев по поверхности .
- Оптимизация траектории: робот выбирает путь, который физически реалистичен и минимизирует усилия по перемещению предмета к цели .
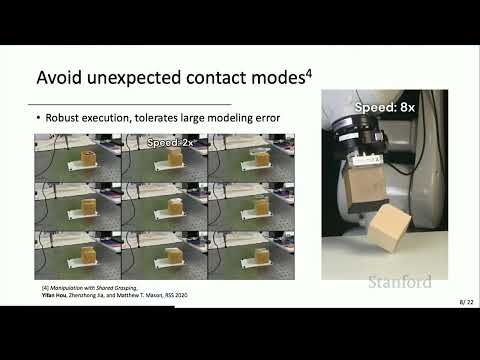
📦 Проект 3: Экстернальная манипуляция (Extrinsic Manipulation) 17:12
Экстернальная манипуляция — это использование окружающей среды (стола, стен) как «дополнительных пальцев». По мнению Альберта, этот процесс можно разбить на примитивы: толкание (pushing), вытягивание (pulling) и вращение на опоре (pivoting) .
Основная инновация здесь — перенос навыка (Retargeting). Исследователи используют одну-единственную демонстрацию человека (даже не на роботе), чтобы зафиксировать последовательность действий . Затем система, используя физические модели и обратную кинематику, адаптирует эти движения под новую форму объекта и новую сцену. Это позволяет выполнять длинные цепочки задач (long-horizon tasks), которые ранее считались неподъемными для простых алгоритмов .
🔍 Вопросы и инженерные вызовы 22:49
В ходе сессии вопросов и ответов один из слушателей спросил, почему на видео часто один палец робота поджат. Альберт честно ответил: для выполнения многих задач достаточно трех точек контакта, и поджатый палец — это просто минимизация сложности вычислений в конкретный момент .
На вопрос о том, почему 87% успеха недостаточно для индустрии, спикер указал на «проблему последней мили». Оставшиеся 13% неудач часто связаны не с алгоритмами, а с инженерными ограничениями: перегревом приводов робота, отсутствием калибровки столкновений с краем стола или механическим заклиниванием . Переход от 90% к 100% надежности требует титанической инженерной работы, сопоставимой по сложности со всем предыдущим этапом разработки .