Активная податливость: ключ к надежной робототехнике 0:10
Современная робототехника демонстрирует впечатляющие успехи в манипуляциях объектами, однако по-прежнему существует серьезный разрыв между эффектными демо-роликами на YouTube и реальной работой роботов в повседневной жизни. По мнению исследователя, работающего с профессором в Стэнфордском университете (Stanford University), основной причиной этого разрыва является недостаточная устойчивость (робастность) алгоритмов управления при столкновении с неизбежными неопределенностями и внешними воздействиями реального мира. В качестве решения проблемы предлагается концепция «активной податливости» (active compliance) — метода, позволяющего роботу динамически менять свои физические свойства для успешного выполнения задач.
Что такое активная податливость? 1:33
Податливость (compliance) — это характеристика мотора, описывающая связь между силой и движением. Выбор профиля податливости кардинально меняет реакцию робота на внешние воздействия:
- Низкая податливость (высокая жесткость): Робот точно следует заданной траектории, но может быть опасен при контакте с неизвестными объектами, так как «расталкивает» препятствия.
- Высокая податливость: Робот легко адаптируется к новым ограничениям среды, «обтекая» препятствия, но становится уязвимым к внешним случайным силам.
Активная податливость позволяет программно реализовывать любой из этих профилей, объединяя лучшие качества обеих стратегий для конкретной задачи.
Аналитический подход к манипуляциям 4:08
Для повышения надежности необходимо понимать, как именно происходят сбои при манипуляциях. Исследователь выделяет две основные причины отказа:
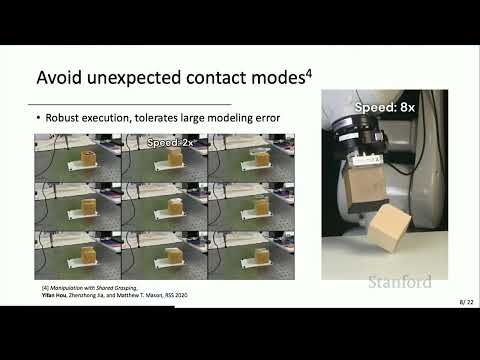
- Неожиданный режим контакта: Ситуация, когда точка контакта внезапно меняет характер (например, переходит из состояния прилипания в скольжение).
- Кинематическая плохая обусловленность: Возникает из-за ошибок калибровки, когда робот пытается совершить движение, противоречащее физическим ограничениям среды, что приводит к созданию разрушительных внутренних сил.
Для борьбы с этими проблемами используется метод гибридного силового управления скоростью (hybrid force-velocity control). Робот разделяет пространство своих действий: в одних направлениях он жестко контролирует скорость, а в других — использует мягкое силовое управление. Алгоритм позволяет найти оптимальный баланс этих настроек менее чем за 1 миллисекунду.
Планирование и обучение на демонстрациях 11:53
Для долгосрочных задач, требующих последовательности действий, применяется основанное на выборке планирование (RT-style planning). Вместо простого поиска пути робот вычисляет «индекс стабильности» для различных вариантов контакта и выбирает те ветви движения, которые проходят заданный порог надежности.
Если создание точной модели среды слишком дорого или сложно, применяется адаптивная политика обучения (Adaptive Compliance Policy, ACP). Метод основан на клонировании поведения человека-оператора:
- Сбор данных: Робот переводится в мягкий режим, и человек совершает действия, используя специальную ручку для управления.
- Обучение: Нейросеть учится предсказывать не только положение, но и профиль податливости.
- Эффективность: При обнаружении высокого сопротивления робот автоматически делает себя податливым в этом направлении, что обеспечивает безопасность и устойчивость к внешним помехам.
Эксперименты показывают, что предложенный метод значительно превосходит базовые подходы с фиксированной податливостью, позволяя роботам успешно справляться даже с ранее не встречавшимися объектами.