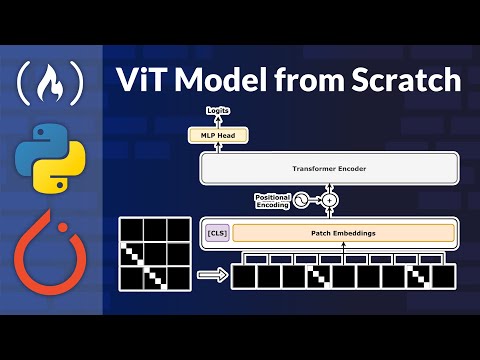
Без нелинейных функций активации даже самая глубокая и сложная нейросеть мгновенно схлопывается в базовую линейную модель, полностью теряя свои преимущества. Этот парадокс лежит в основе архитектуры современного ИИ, где грань между вычислением градиентов и их практическим применением определяет успех обучения. Перед вами детальный разбор пятидесяти ключевых концепций Deep Learning — от базовой структуры слоев и методов регуляризации до изящных механизмов оптимизации сверхглубоких сетей.
🚀 Погружение в Deep Learning: как пройти собеседование в эпоху генеративного ИИ 0:00
Путеводитель по собеседованиям: от основ к продвинутым концепциям 0:00
Собеседования в сфере искусственного интеллекта и анализа данных становятся все более комплексными, поскольку глубокое обучение (Deep Learning) сегодня является краеугольным камнем таких прорывных технологий, как большие языковые модели (LLM) и генеративный ИИ. Ведущая курса Ди из образовательного проекта Learner Tech, опытный специалист в области Data Science и автор научных публикаций в профильных журналах, представляет интенсивный план подготовки. Ее курс разработан специально для тех, кто планирует проходить интервью на позиции Data Scientist, Machine Learning Engineer, AI Engineer или Research Scientist. Глубокое обучение объединяет в себе линейную алгебру, математический анализ, теорию дифференцирования и продвинутые алгоритмы.
Программа курса построена по принципу усложнения и разбита на блоки по 10 вопросов, охватывая в общей сложности 50 самых популярных тем. Ди подчеркивает, что цель этого интенсива — не изучение материала с нуля, а быстрое освежение памяти перед реальным интервью. Для успешного освоения курса соискателям рекомендуется заранее повторить базовую статистику и основы классического машинного обучения, используя для этого учебные материалы Learner Tech или справочник Fundamentals to Machine Learning от freeCodeCamp. Весь цикл подготовки построен так, чтобы соискатель мог уверенно отвечать не только на стандартные формулировки, но и на каверзные уточняющие вопросы интервьюеров.
Вводная часть курса закладывает фундамент для понимания более сложных тем. В частности, грядущие блоки вопросов затронут такие аспекты, как функции активации, градиентный спуск, адаптивные оптимизаторы, методы регуляризации и нормализации, которые подробно будут рассмотрены в последующих главах этой статьи.
Что такое Deep Learning и как оно имитирует человеческий мозг 8:05
Первый фундаментальный вопрос, с которого начинается любое профильное собеседование: «Что такое Deep Learning?». Кандидату важно продемонстрировать системное понимание и правильно определить место этой дисциплины в иерархии технологий. Глубокое обучение — это строгое подмножество машинного обучения (Machine Learning), которое, в свою очередь, является ветвью искусственного интеллекта (AI). Суть метода заключается в обучении искусственных нейронных сетей на огромных массивах данных для автоматического поиска скрытых паттернов и сложных нелинейных взаимосвязей. С этой задачей традиционные алгоритмы справляются далеко не всегда.
Концептуально глубокое обучение пытается воспроизвести механизмы работы человеческого мозга. Подобно тому, как человек воспринимает внешние сигналы через зрение, слух или обоняние, а затем обрабатывает их для формулирования выводов, нейросети принимают входные данные и трансформируют их. Процесс включает передачу информации через входной слой в скрытые слои, где происходит активация нейронов.
Среди классических примеров моделей глубокого обучения Ди выделяет следующие архитектуры:
- Искусственные нейронные сети (ANN)
- Рекуррентные нейронные сети (RNN)
- Сети долгосрочной краткосрочной памяти (LSTM)
- Вариационные автокодировщики (VAE)
Именно на базе этих нейросетевых архитектур строятся современные системы компьютерного зрения, инструменты машинного перевода, а также знаменитые большие языковые модели семейства GPT и T5. При ответе на собеседовании Ди советует делать упор именно на способность сетей извлекать высокоуровневые абстракции, не углубляясь на первых минутах в математические детали параметров.
Глубокое обучение против классического Machine Learning: битва за признаки и масштаб 11:41
Второй критически важный вопрос интервью касается ключевых отличий Deep Learning от традиционных моделей машинного обучения. Чтобы продемонстрировать широкий кругозор, соискателю полезно перечислить популярные классические алгоритмы:
- Линейная и логистическая регрессия
- Метод опорных векторов (SVM) и Наивный байесовский классификатор
- Алгоритмы кластеризации K-Means и DBSCAN
- Ансамбли деревьев решений, такие как Random Forest, GBM и XGBoost
Главное водораздельное отличие между ними заключается в подходе к признакам. Традиционные модели ML критически зависят от ручного проектирования и отбора признаков (manual feature extraction). Напротив, модели Deep Learning выполняют автоматическое извлечение признаков (automatic feature extraction). Многослойная структура нейросети самостоятельно определяет, какие характеристики входных данных наиболее важны для решения задачи регрессии или классификации.
Второе принципиальное преимущество — масштабируемость. Классические алгоритмы машинного обучения склонны к деградации качества, переобучению или нестабильности при лавинообразном росте объемов данных и признаков. Глубокое обучение, наоборот, раскрывает свой истинный потенциал именно на сверхбольших выборках (Big Data). Это позволило совершить технологический прорыв в распознавании речи, компьютерном зрении и автоматическом переводе, где объемы обучающих данных колоссальны.
Ранее в разговоре они также кратко касались основ и архитектуры нейронных сетей, структуры отдельных нейронов, весов, смещений и принципов нелинейной активации для минимизации ошибок предсказания. Ди сравнивает простейшую структуру нейросети с промышленным конвейером, где каждый этап последовательно усложняет представление данных (например, от пикселей до конкретных объектов вроде кошачьих ушей). Однако подробный технический разбор этих тем авторы оставили для специализированных разделов курса, которые будут развернуто описаны в следующих главах.
🏗️ Архитектура нейронных сетей: от входных признаков до финального предсказания 25:27
Входной слой: цифровое описание реальности 25:27
Любое обучение модели начинается с правильного представления данных, и в классической архитектуре нейросетей эта роль отведена входному слою. Компоненты этого слоя, обозначаемые в математических моделях как $Z_1, Z_2, Z_3 \dots Z_n$, представляют собой не что иное, как базовые признаки (features), описывающие исследуемый объект. Сложность и глубина сети приобретают смысл только тогда, когда входные данные точно отражают характеристики реального мира, позволяя модели строить качественные прогнозы.
Чтобы придать этой абстракции наглядность, можно рассмотреть классическую задачу оценки стоимости жилой недвижимости. Для точного предсказания цены нейронной сети необходимо передать набор дифференцирующих факторов, которые напрямую влияют на финальную рыночную стоимость объекта. В данном сценарии входные нейроны будут содержать следующие структурированные параметры:
-
Количество спален в доме ($Z_1$);
-
Этажность здания ($Z_2$);
-
Наличие или отсутствие плавательного бассейна ($Z_3$);
-
Год постройки или фактический возраст здания ($Z_4$).
Каждый из этих признаков описывает строго определенную характеристику элемента данных. Совокупность этих сигналов подается на вход системы, формируя фундамент, на котором нейросеть будет учиться понимать скрытые взаимосвязи и закономерности.
Синаптические веса и смещения: математика внимания 26:46
Перенос информации от входного слоя к последующим структурам не происходит хаотично — он регулируется синаптическими весами. В простейших схемах веса обозначаются индексами, указывающими направление связи, например, $w_{11}$, $w_{12}$ или $w_{13}$. Визуально их можно представить в виде стрелок, которые ведут от каждого конкретного входа к элементам следующего, скрытого слоя. Основная функция весов заключается в том, чтобы определить, какой именно вклад каждый входной признак должен внести в формирование финального значения конкретного скрытого нейрона.
По сути, весовые коэффициенты работают как инструмент распределения «внимания» нейросети. Например, коэффициент $w_{11}$ связывает первый признак $Z_1$ с первым скрытым юнитом $H_1$, указывая системе, насколько сильно данный параметр должен учитываться при расчете. Соответственно, вес $w_{12}$ определяет степень влияния того же первого признака, но уже при передаче информации во второй скрытый юнит $H_2$.
Математическая обработка этих данных сводится к вычислению так называемых Z-значений (Z-scores). Формула вычисления базового значения выглядит следующим образом: $$Z = W \cdot X + B$$ Здесь вектор весов $W$ умножается на матрицу входных данных $X$, после чего к результату добавляется вектор смещения (bias vector), обозначаемый как $B$. Смещение позволяет сдвигать линейную функцию, обеспечивая модели дополнительную гибкость при аппроксимации данных.
Скрытые слои и агрегация сигналов 27:15
Полученные сигналы устремляются в скрытые слои (hidden layers), которые и определяют вычислительную мощность системы. В базовых демонстрационных архитектурах часто изображают всего один скрытый слой, однако реальные коммерческие задачи требуют интеграции множества таких слоев. Именно эта многослойность и дала название всей индустрии — глубокое обучение (deep learning).
Количество нейронов в скрытом слое (например, три скрытых юнита $H_1, H_2, H_3$) не является фиксированным. Это классический гиперпараметр, который разработчик настраивает самостоятельно в процессе конфигурации и обучения нейросети. Процесс обработки информации внутри скрытого юнита можно назвать агрегацией. Если посмотреть на структуру скрытого нейрона $H_1$, к нему сходятся сразу несколько направленных стрелок-связей: $w_{11}$, $w_{21}$, $w_{31}$ и $w_{n1}$. Это означает, что юнит собирает, взвешивает и суммирует поступающие к нему Z-значения от всех доступных входных каналов.
Стоит отметить, что далее в разговоре собеседники подробно обсуждают применение нелинейных функций активации (таких как Sigmoid, Tanh, ReLU и Leaky ReLU), которые выполняют роль «вратарей», определяющих объем передаваемой информации и защищающих модель от превращения в банальную линейную регрессию. Однако детальный математический разбор этих функций, а также связанная с ними проблема насыщения и исчезновения градиентов закреплены за главами 3 и 7.
Выходной слой и формирование результата 30:32
Финальным этапом распространения информации в архитектуре сети является выходной слой (output layer). После того как скрытые юниты успешно извлекли и обработали информацию из входных данных на основе весов и векторов смещения, управление передается финальным весовым коэффициентам — $w_{h1}$, $w_{h2}$ и $w_{h3}$. Они определяют индивидуальный вклад каждого скрытого нейрона в формирование окончательного ответа системы.
Задача выходного слоя — представить прогноз в строго заданном, интерпретируемом формате. Конкретная реализация полностью зависит от типа решаемой задачи:
-
В задачах регрессии на выходе формируется непрерывное числовое значение стоимости или объема;
-
В задачах классификации требуется трансформировать данные в формат вероятности, лежащий в строго определенном диапазоне между 0 и 1.
Полученное вероятностное значение затем переводится в конкретный класс (например, 0 или 1) и сравнивается с истинной меткой (true label) из обучающей выборки, чтобы оценить общую точность и качество работы построенной нейронной сети.
В завершении интервью спикеры кратко затрагивают фундаментальные основы обучения базовых сетей, включая концепты прямого прохода (forward pass), обратного распространения ошибки (back propagation) и расчета функций потерь, таких как кросс-энтропия или среднеквадратичное отклонение. Эти сквозные процессы оптимизации и обучения будут подробно развернуты далее в главах 5 и 6.
🧠 Роль и многообразие функций активации 54:40
В процессе обучения нейронной сети функции активации играют фундаментальную роль, обеспечивая введение нелинейности в архитектуру модели. Без них глубокая нейронная сеть, по сути, превратилась бы в простую линейную регрессию, независимо от количества скрытых слоев. В ходе прямого прохода (forward pass) мы последовательно вычисляем активации, пропуская входные данные через весовые коэффициенты и векторы смещений, где функции активации определяют, какой именно сигнал должен быть передан дальше по сети.
Почему без них не обойтись 54:40
Функция активации — это математическая операция, которая определяет, активируется ли конкретный нейрон. Именно наличие нелинейных функций позволяет сети моделировать сложные, нелинейные зависимости в данных. Если бы мы использовали исключительно линейные преобразования на каждом слое, то серия матричных умножений сводилась бы к одному-единственному линейному преобразованию, лишая модель способности к «глубокому» обучению. Использование функций активации является критическим этапом в формировании предсказаний модели ($\hat{y}$).
Популярные виды функций активации 54:40
Хотя технические аспекты инициализации весов и нормализации, обсуждавшиеся ранее в курсе, также влияют на стабильность обучения, выбор правильной функции активации остается ключевым дизайнерским решением. Среди наиболее известных инструментов:
- Sigmoid: Исторически популярная функция, которая преобразует входное значение в диапазон от 0 до 1. Она удобна для задач бинарной классификации, где требуется получить вероятность.
- Tanh (Гиперболический тангенс): Выход этой функции лежит в диапазоне от -1 до 1. Она часто предпочтительнее сигмоиды, так как её выход центрирован вокруг нуля, что может ускорить сходимость.
- ReLU (Rectified Linear Unit): На текущий момент это стандарт де-факто для скрытых слоев во многих нейросетях. Она зануляет все отрицательные значения и оставляет положительные неизменными. Простота ReLU помогает избежать вычислительных трудностей при обратном распространении ошибки.
- Leaky ReLU: Модификация ReLU, которая вместо полного обнуления отрицательных значений оставляет им небольшой наклон. Это позволяет избежать проблемы «умирающих нейронов», когда градиент полностью исчезает.
Принципиально важно понимать, что выбор функции активации напрямую влияет на градиенты, которые мы вычисляем в процессе обратного распространения ошибки (backpropagation). Эти производные определяют, как именно веса и смещения должны корректироваться для минимизации функции потерь, делая сеть более точной с каждой итерацией.
🌐 Разделение обязанностей: от математики градиентов до вычислительных графов 75:21
Бэкпроп и градиентный спуск: устранение вечной путаницы 77:25
На технических собеседованиях по глубокому обучению кандидатам часто задают коварный вопрос о разнице между обратным распространением ошибки (backpropagation) и градиентным спуском (gradient descent). Этот вопрос призван проверить фундаментальное понимание процессов, поскольку разработчики часто интуитивно объединяют их в один монолитный этап обучения. В стандартном ответе соискатели обычно описывают весь цикл: прямой проход, вычисление функции потерь, расчет градиентов и последующее обновление параметров от глубоких слоев к начальным. Однако с методологической точки зрения это принципиально разные сущности, разделение обязанностей между которыми выглядит очень просто.
Различие между ними заключается в следующем:
-
Обратное распространение — это исключительно процесс вычисления частичных производных функции потерь по отношению к весам и векторам смещения. Для этого используется правило дифференцирования сложной функции (chain rule). Результатом бэкпропа являются исключительно значения самих градиентов.
-
Градиентный спуск — это алгоритм оптимизации, который принимает вычисленные на этапе бэкпропа градиенты в качестве входных данных и использует их для фактического обновления весов модели с целью минимизации лосса.
Ранее в разговоре спикеры касались функций активации и основ архитектуры нейронных сетей, и важно помнить, что бэкпроп выполняется строго в середине итерации, аккурат между прямым проходом и шагом оптимизатора. В процессе вычисления производных могут возникать аномалии (такие как затухание градиентов, подробно рассматриваемое в других главах), на которые напрямую влияет выбор функций активации из-за эффекта насыщения. Например, сигмоида и гиперболический тангенс склонны приводить к затуханию градиентов на скрытых слоях, в то время как ReLU и Leaky ReLU успешно решают эту проблему.
Анатомия аномалий: почему отдельный нейрон выдаёт стабильно высокую ошибку 93:47
Еще один классический и глубокий вопрос, с которым можно столкнуться на интервью: что делать, если конкретный нейрон в скрытом слое постоянно демонстрирует огромную ошибку при обратном распространении? Спикер выделяет несколько ключевых причин, способных изолированно или комплексно дестабилизировать работу отдельного вычислительного узла:
-
Плохая инициализация весов. Если в самом начале обучения веса и смещения инициализированы некорректно (выбрано неверное случайное распределение или заданы неподходящие константы), это мгновенно смещает траекторию обучения данного нейрона. Ошибка, заложенная на первом же проходе, каскадом переносится на все последующие итерации, усугубляя дисбаланс.
-
Проблемы затухания или взрыва градиентов. Когда градиенты весов конкретного нейрона становятся критически малыми, он перестает обновлять свои параметры и «выключается» из процесса адаптации к зависимостям в данных. В противоположном случае — при взрыве градиентов — обновления становятся слишком хаотичными и огромными, что также генерирует колоссальные ошибки.
-
Неадекватный шаг обучения (learning rate). Слишком высокая скорость обучения приводит к «перелету» (overshooting) через оптимальные значения параметров, а слишком низкая — к их стагнации. Оба сценария заставляют нейрон непрерывно ошибаться.
-
Неподходящая функция активации. Неверно подобранный характер активации может заблокировать способность нейрона эффективно передавать сигналы и адаптировать веса под структуру данных.
Инженеру критически важно уметь оптимизировать эти гиперпараметры, чтобы обеспечивать равномерное и стабильное обучение каждого слоя системы.
Вычислительный граф как карта дериваций 97:47
Для систематизации и наглядного представления всех сложных математических трансформаций, происходящих при обучении моделей, применяется концепция вычислительного графа (computational graph). Это инструмент визуализации, преобразующий абстрактные формулы в понятную топологическую структуру, состоящую из узлов и ребер.
Принципы построения вычислительного графа для нейросети выглядят следующим образом:
-
Узлы (nodes) графа представляют собой объекты, переменные или сигналы. На самом первом этапе — это входные данные $X_1, X_2, X_3$. На скрытых слоях узлами становятся промежуточные взвешенные суммы (Z-scores) и соответствующие им значения активаций, например $Z_1, A_1, Z_2, A_2$ для каждого скрытого юнита.
-
Ребра (edges), изображаемые в виде стрелок, задают операции, математические функции или трансформации, которые применяются к переменным. Они показывают направление движения данных от входов к выходам скрытых слоев и далее к финальному предсказанию.
Конечной точкой этого графа является узел предсказания модели — $\hat{Y}$. Граф наглядно иллюстрирует, как на основе входных векторов $X_i$, умноженных на транспонированную матрицу весов $W^T$ с добавлением вектора смещения $b$, формируется итоговый прогноз. Такая строгая декомпозиция вычислений позволяет современным фреймворкам автоматически производить дифференцирование любой сложности, проходя по ребрам графа в обратном направлении.
🔄 Процесс обучения: от прямого прохода до обратного распространения 1:40:43
Обучение нейронной сети — это итеративный процесс, требующий последовательного выполнения ряда математических операций для минимизации ошибки. В основе этого процесса лежит прямой проход (forward pass): данные поступают на вход, проходят через слои нейронов, где к ним применяются веса и функции активации. На выходе мы получаем предсказание, которое сравнивается с истинным значением, что позволяет вычислить функцию потерь (loss function) и определить степень «ошибки» модели.
Для визуализации этих сложных матричных преобразований, особенно в глубоких архитектурах с миллиардами параметров, используется вычислительный граф. Он упрощает понимание того, как данные трансформируются от входных переменных до финальных прогнозов, а также наглядно демонстрирует обратный проход (backpropagation). Обратное распространение ошибки позволяет вычислить градиенты — частные производные функции потерь по отношению к весам сети — что необходимо для последующего обновления параметров модели и её обучения.
📉 Проблема «взрывающихся» градиентов и градиентное отсечение 1:43:06
При работе с глубокими нейронными сетями, особенно с рекуррентными структурами вроде RNN и LSTM, существует риск возникновения проблем с градиентами. Ранее в разговоре уже упоминалась проблема исчезающих градиентов и роль остаточных связей (residual connections) в её решении.
Противоположной по сути является проблема взрывающихся градиентов. Из-за последовательной природы архитектур, где веса умножаются друг на друга на каждом этапе, градиенты могут стать аномально большими. Это приводит к дестабилизации процесса обучения: модель совершает слишком резкие «прыжки», что проявляется в хаотичных (осциллирующих) изменениях весов. Для предотвращения этого используется градиентное отсечение (gradient clipping). Суть метода проста: если норма градиента превышает заданный порог, значение градиента принудительно «обрезается». Это позволяет стабилизировать обучение и избежать «эретических» скачков.
🎯 Функции потерь: Cross Entropy и Softmax 1:47:21
Выбор функции потерь критически важен для оценки качества предсказаний модели. Кросс-энтропия (cross entropy), часто называемая логарифмической функцией потерь (log loss), является стандартом для задач бинарной классификации, где выход модели представлен в виде вероятности от 0 до 1. Она измеряет расхождение между предсказанной вероятностью и истинной меткой класса. Использование логарифмов позволяет превратить задачу максимизации правдоподобия в задачу минимизации ошибки, что математически удобнее для оптимизационных алгоритмов.
Когда же перед нами стоит задача мультиклассовой классификации (например, отнесение изображения к одному из трех сезонов: лето, весна или зима), применяется Softmax-функция. В отличие от бинарного случая, здесь на выходе мы получаем не одно число, а вектор вероятностей, сумма элементов которого равна единице. Это позволяет модели уверенно распределять вероятности между всеми доступными классами, обеспечивая четкую интерпретацию результата.
⚡ Стохастический градиентный спуск (SGD) 1:53:21
SGD — это эффективный алгоритм оптимизации, который ускоряет обучение нейронных сетей за счет обновления параметров не на всем наборе данных, а на случайных подвыборках (или даже на отдельных примерах). Хотя такой подход делает процесс обучения значительно быстрее и менее требовательным к памяти, он вносит определенный уровень шума в оценку градиентов.
Этот «шумный» градиент становится причиной осцилляций, когда модель «прыгает» вокруг глобального минимума, периодически выбирая неверное направление из-за неточной оценки на малых выборках. Среди факторов, влияющих на интенсивность этих колебаний:
- Использование случайных подмножеств: Неполнота данных приводит к высокой вариативности направлений обновления.
- Размер шага (learning rate): Слишком высокая скорость обучения увеличивает амплитуду «прыжков».
- Несовершенная оценка: Использование малых выборок вместо всего датасета делает оценку градиента менее точной, что вынуждает модель чаще ошибаться при выборе пути к минимуму.
В сравнении с классическим градиентным спуском, использующим весь набор данных, SGD выигрывает в скорости и вычислительной эффективности, но требует осторожного подбора параметров для достижения стабильной сходимости.
📉 Градиентный спуск и его вариации 2:05:46
В основе обучения нейронных сетей лежит поиск оптимальных параметров модели, которые минимизируют функцию потерь. Процесс минимизации этой функции — это задача оптимизации, где ключевую роль играют алгоритмы градиентного спуска.
Различия между GD, SGD и mini-batch GD 2:14:28
Существует три основных подхода к обновлению весов, различающихся объемом используемых данных и эффективностью:
- Batch Gradient Descent (GD): Классический подход, при котором для вычисления градиента используется весь тренировочный набор данных на каждой итерации. Это позволяет алгоритму вычислять точный градиент, обеспечивая стабильную и качественную сходимость к глобальному оптимуму. Однако это крайне ресурсоемкий процесс: необходимость хранить весь датасет в оперативной памяти делает GD медленным и практически неприменимым для больших и сложных данных.
- Stochastic Gradient Descent (SGD): Прямая противоположность GD. Вместо всего набора данных SGD использует для каждой итерации один случайный пример или очень малую группу примеров. Это значительно ускоряет обучение и снижает требования к памяти. Цена такой эффективности — «зашумленные» градиенты, которые приводят к частым колебаниям (осцилляциям) в процессе обучения. Из-за этого SGD может путать локальные минимумы с глобальным.
- Mini-batch Gradient Descent: «Золотая середина» между GD и SGD. Алгоритм разбивает данные на небольшие пакеты (батчи) и выполняет обновление параметров на каждом из них. Это позволяет совместить вычислительную эффективность SGD со стабильностью GD. По своей сути этот метод напоминает $k$-блочную кросс-валидацию, где данные для обучения подаются порционно.
SGD с моментом (Momentum) 2:08:28
Для борьбы с проблемой осцилляций в SGD была разработана модификация — SGD с моментом. Основная идея заключается в том, чтобы при обновлении весов учитывать не только текущий градиент, но и направление, в котором алгоритм двигался на предыдущих шагах.
Математически это выражается через накопление «скорости» (момента):
$$v_{t+1} = \gamma v_t + \eta \nabla J(\theta_t)$$ $$\theta_{t+1} = \theta_t - v_{t+1}$$
Здесь $\gamma$ — коэффициент затухания, определяющий влияние предыдущих обновлений, а $\eta$ — скорость обучения (learning rate). Накопление момента делает процесс обновления более консистентным, сглаживая случайные колебания и позволяя быстрее «набирать скорость» в сторону истинного глобального оптимума.
Влияние размера батча на обучение 2:19:28
Выбор размера батча — стратегическое решение, влияющее на все аспекты работы модели:
- Маленькие батчи (1–32 примера): Вносят много «шума» в оценку градиента, что часто мешает точному поиску минимума. Однако за счет этого шума модель лучше обобщается (generalization) и реже переобучается, так как не запоминает «зашумленные» примеры данных. Обучение при малых батчах более нестабильно, но вычислительно менее затратно.
- Большие батчи: Обеспечивают более точную оценку градиента и сходимость к «острым» минимумам. Тем не менее, они склонны к переобучению и хуже обобщаются на новые данные, так как модель более точно «подгоняется» под обучающую выборку. Кроме того, они требовательны к памяти и могут быть невозможны для реализации на ограниченном железе.
🧠 Проблема исчезающих и взрывающихся градиентов
Анализ нестабильности глубоких сетей 2:39:38
При обучении глубоких нейронных сетей одной из самых серьезных проблем является нестабильность градиентов, которая проявляется в двух крайних формах: исчезновении (vanishing) и взрыве (exploding) градиентов. Когда градиенты начинают стремиться к нулю, они становятся пренебрежимо малыми, что практически останавливает процесс обучения на глубоких слоях. В противоположной ситуации, когда градиенты становятся неоправданно большими, это приводит к резким и некорректным обновлениям весов, вызывая значительные осцилляции в процессе поиска минимума функции потерь.
Адаптивные методы как инструмент стабилизации 2:36:58
Традиционные алгоритмы градиентного спуска (GD, SGD), а также их вариации с моментом, используют единую скорость обучения (learning rate) для всех параметров сети, что делает их крайне уязвимыми перед лицом нестабильных градиентов. Использование адаптивных методов оптимизации позволяет решить проблему стагнации и чрезмерных колебаний. Эти алгоритмы динамически адаптируют шаг обновления индивидуально для каждого параметра, основываясь на статистике их градиентов.
Одним из таких решений является RMSProp (Root Mean Square Propagation). Его механизм борьбы с нестабильностью заключается в использовании экспоненциально скользящего среднего квадратов градиентов.
- Если градиент для параметра большой, RMSProp уменьшает эффективную скорость обучения, что помогает подавить эффект «взрывающихся» градиентов.
- Если градиент мал, алгоритм увеличивает скорость обучения для данного параметра, предотвращая его исчезновение.
Этот процесс контролируется параметром затухания (обычно $\beta \approx 0.9$), который определяет «память» алгоритма о прошлых градиентах.
Роль моментов в оптимизации 2:43:49
Алгоритм Adam (Adaptive Moment Estimation) развивает идеи адаптивности, комбинируя концепцию моментов из SGD с подходом RMSProp к оценке вторых моментов. Adam отслеживает не только скользящее среднее самих градиентов (первый момент), но и скользящее среднее их квадратов (второй момент).
Второе упоминание проблем градиентов косвенно затрагивало вопрос инициализации весов и нормализации, которые также играют ключевую роль в обеспечении стабильности глубоких сетей, однако эти методы рассматриваются отдельно (ранее в разговоре они касались инициализации весов и нормализации данных). Сочетание адаптивного управления шагом и коррекции смещения (bias correction) в Adam позволяет достичь высокой стабильности обучения, при которой модель становится менее чувствительной к выбору начальной скорости обучения.
-
🧠 Оптимизация обучения и инициализация весов 2:55:55
В процессе обучения нейронных сетей крайне важно обеспечить стабильность распределения активаций на разных слоях. Когда градиенты используются для обновления параметров модели, это неизбежно приводит к изменению распределения активаций, что может дестабилизировать сеть. Чтобы предотвратить это и повысить эффективность алгоритма, практикуется нормализация активаций, при которой пакеты данных приводятся к определенным статистическим свойствам, например, к нормальному распределению.
Адаптивные методы оптимизации и стабильность обучения 3:00:20
Одним из способов повышения стабильности является использование методов, которые позволяют применять более высокие скорости обучения (learning rates), ускоряя процесс сходимости. Стабильный процесс обучения снижает вероятность нежелательных осцилляций, характерных для классического стохастического градиентного спуска (SGD), помогая быстрее достичь глобального минимума функции потерь. Кроме того, нормализация снижает чувствительность алгоритма к начальной инициализации весов и смещений (bias), что критически важно, так как неудачная инициализация может увести модель в область локальных минимумов. Стоит отметить, что ранее в обсуждении затрагивались общие проблемы обучения, такие как исчезающие и взрывающиеся градиенты, а также методы регуляризации.
Xavier-инициализация: баланс дисперсии 3:18:22
Эффективная инициализация весов — фундаментальный этап построения глубоких сетей. Основная цель Xavier-инициализации (также известной как инициализация Глорота) заключается в сохранении дисперсии активаций и градиентов постоянной при прохождении через слои сети. Для реализации этой стратегии начальные веса задаются с учетом количества входных ($n_{in}$) и выходных ($n_{out}$) нейронов конкретного слоя.
- $n_{in}$ — количество нейронов, входящих в слой.
- $n_{out}$ — количество нейронов, выходящих из слоя.
Использование этих параметров позволяет определить распределение, из которого будут взяты начальные значения весов. Часто для этих целей применяется равномерное распределение, параметры которого (границы $[a, b]$) рассчитываются на основе количества нейронов. Например, использование границ вида:
$$\pm \sqrt{\frac{6}{n_{in} + n_{out}}}$$
позволяет поддерживать дисперсию весов на стабильном уровне, что способствует более устойчивому распространению сигнала по всей глубине архитектуры.
-
🛡️ Методы борьбы с переобучением: регуляризация и контроль весов 3:26:40
Переобучение (overfitting) остается одной из главных угроз при работе с глубокими нейронными сетями. Оно возникает, когда модель начинает буквально «зазубривать» обучающую выборку, включая случайный шум и выбросы, вместо того чтобы выявлять общие закономерности. В контексте нейросетей это напрямую связано с весами: слишком большие значения весов делают модель чрезмерно чувствительной к конкретным входным данным. Чтобы повысить обобщающую способность модели на новых, не виденных ранее данных, применяются методы регуляризации.
📉 L1- и L2-регуляризация: штрафы за сложность 3:41:29
Регуляризация L1 (Lasso) и L2 (Ridge) основана на добавлении штрафного слагаемого к функции потерь. Это слагаемое ограничивает рост весов, заставляя модель оставаться «простой».
- L2-регуляризация: добавляет к функции потерь сумму квадратов весов, умноженную на коэффициент регуляризации $\lambda$. Она пропорционально уменьшает веса, стремясь к нулю, но никогда не делает их строго нулевыми. Это позволяет распределить влияние между всеми нейронами, делая модель более устойчивой.
- L1-регуляризация: добавляет сумму абсолютных значений весов. В отличие от L2, L1 способна обнулять веса некоторых нейронов. Таким образом, она не только борется с переобучением, но и выполняет своеобразный отбор признаков (feature selection), оставляя только самые значимые связи.
Ранее в разговоре упоминалось, что использование подходящих архитектур, таких как Transformers, где применяются остаточные связи и нормализация, также помогает бороться с нестабильностью и переобучением.
🎲 Dropout: случайность как ключ к обобщению 3:29:33
Dropout — один из самых популярных и эффективных методов регуляризации в глубоком обучении. Его идея заключается в случайном «выключении» (деактивации) нейронов во время каждой итерации обучения.
Процесс управляется гиперпараметром $p$ — вероятностью отключения (dropout rate). Если мы установим $p = 0.2$, это значит, что в каждой итерации 20% нейронов в слое будут временно отключаться, а 80% (вероятность $1-p$) оставаться активными. Математически состояние нейронов описывается распределением Бернулли.
Почему это работает?
- Устранение ко-адаптации: нейроны не могут полагаться на «подстраховку» со стороны соседей, так как те могут быть случайным образом отключены.
- Снижение зависимости от шума: модель видит лишь «разреженные» версии данных, что не дает ей запоминать шум или специфические выбросы.
- Ансамблевый эффект: по сути, Dropout имитирует обучение огромного количества разных архитектур нейросетей, которые затем усредняются.
⚖️ Dropout против Random Forest 3:34:46
Хотя Dropout и Random Forest — принципиально разные алгоритмы, их объединяет общая цель: улучшение устойчивости модели через введение случайности.
- Сходство: оба метода декоррелируют обучающий процесс. В Random Forest случайность вносится через использование бутстрап-выборок и случайный выбор признаков ($m$) при разбиении узлов дерева. Dropout достигает схожего эффекта за счет случайного отключения нейронов.
- Различия: Dropout — это техника регуляризации для одной конкретной нейронной сети. Random Forest — это полноценный ансамблевый алгоритм, который объединяет множество независимых моделей (деревьев) для получения итогового предсказания.
🔄 Нюансы применения: обучение vs тестирование 3:39:28
Важно помнить, что Dropout используется только на этапе обучения. В процессе тестирования (инференса) все нейроны активны. Из-за этого возникает несоответствие в масштабе активаций. Чтобы компенсировать этот эффект и сохранить консистентность, необходимо масштабировать веса (или активации) на этапе тестирования, умножая их на коэффициент $1-p$. Например, при dropout-rate $0.2$, мы должны масштабировать выходные значения на $0.8$.
🛠️ Архитектурные столпы глубоких сетей: Остаточные связи и нормализация 3:53:25
Ранее в разговоре подробно рассматривались методы регуляризации для борьбы с переобучением, такие как L1 и L2 регуляризация, однако для построения по-настоящему крупномасштабных моделей требуются фундаментальные архитектурные решения. Когда нейронные сети начали стремительно развиваться, увеличивая количество скрытых слоев до десятков и сотен, исследователи столкнулись с серьезными барьерами. Сложность вычислений росла, а стабильность обучения падала. В то время как классические алгоритмы машинного обучения критически зависят от ручного отбора признаков или внешних методов снижения размерности, глубокое обучение предлагает принципиально иной подход к работе со сложными структурами. Современные глубокие модели способны самостоятельно конструировать информативные иерархические представления данных, успешно преодолевая вычислительные вызовы и эффективно выучивая сложные скрытые зависимости и нелинейные паттерны. Двумя главными инструментами, сделавшими возможным обучение сверхглубоких сетей, стали механизмы остаточных связей и усовершенствованные методы нормализации внутренних слоев.
Механизм остаточных связей (Residual Connections) 3:53:25
При переходе к сверхглубоким архитектурам ключевой проблемой становится обеспечение беспрепятственного прохождения информационного сигнала и градиентов через всю цепочку вычислений. В традиционных последовательных сетях (feed-forward) каждый последующий слой полностью перезаписывает или трансформирует информацию, полученную от предыдущего. Из-за этого при значительном увеличении глубины возникает так называемый эффект деградации: точность обучения на тренировочной выборке начинает падать, причем это связано не с переобучением, а именно со сложностью оптимизации очень глубокой функции.
Для преодоления этого фундаментального ограничения был разработан механизм "коротких путей" (shortcuts), известный в индустрии как остаточные связи (Residual Connections). Идея, лежащая в основе этой архитектуры, изящна и проста: сигнал с предыдущего этапа вычислений передается на более глубокие уровни напрямую, в обход промежуточных нелинейных трансформаций. Если представить функцию, реализуемую парой промежуточных слоев, как $F(x)$, то итоговый выходной сигнал блока преобразуется следующим образом:
$$y = F(x) + x$$
Здесь $x$ — это исходный входной вектор, поступающий на вход остаточного блока. Подобное математическое сложение кардинально меняет динамику оптимизации всей системы. Можно выделить несколько важнейших преимуществ данного подхода:
- Прямой поток градиентов: во время обратного прохода (backpropagation) градиент ошибки может беспрепятственно течь назад по "короткому пути" напрямую к ранним слоям сети, минуя потенциально затухающие матрицы весов промежуточных слоев.
- Облегчение тождественного отображения: если определенные скрытые слои оказываются избыточными для конкретной задачи, оптимизатору гораздо проще занулить веса функции $F(x)$, сведя блок к простому тождественному переносу информации ($y = x$).
Благодаря внедрению остаточных связей нейросетевые модели смогли без потери качества масштабироваться до сотен и тысяч вычислительных слоев, уверенно выстраивая многоуровневые абстракции для высокоразмерных данных. Архитектуры, использующие этот паттерн (например, знаменитая ResNet), избавили инженеров от жестких ограничений по глубине и открыли путь к созданию современных крупномасштабных систем ИИ.
Стабилизация обучения: Batch и Layer Normalization 3:56:03
Параллельно с решением проблемы прохождения градиентов, исследователи глубокого обучения искали способ стабилизировать динамику распределения данных внутри самой сети. Дело в том, что в процессе обучения параметры каждого конкретного слоя непрерывно обновляются. Это приводит к тому, что распределение активаций на входе каждого последующего слоя постоянно сдвигается от итерации к итерации. Данный феномен, известный как внутренний ковариационный сдвиг (Internal Covariate Shift), вынуждает верхние слои сети непрерывно подстраиваться под меняющийся фундамент, что существенно замедляет сходимость алгоритма.
Для нейтрализации этого эффекта и ускорения сходимости моделей были разработаны специализированные техники внутренней нормализации данных. Исторически первым и наиболее массовым решением стала пакетная нормализация (Batch Normalization). Основной принцип Batch Norm заключается в том, что активации скрытого слоя нормализуются на основе статистических показателей текущего мини-пакета (mini-batch) данных непосредственно во время обучения. Для каждого признака вычисляются среднее значение и дисперсия в рамках текущего батча, после чего данные центрируются и масштабируются с помощью двух обучаемых параметров — сдвига и масштаба.
Тем не менее, у пакетной нормализации обнаружились явные практические недостатки: она жестко привязана к размеру мини-пакета и демонстрирует нестабильное поведение при маленьких размерах батча. Более того, Batch Norm крайне трудно эффективно применять в рекуррентных архитектурах или моделях, работающих с последовательностями переменной длины.
В качестве гибкой альтернативы была предложена нормализация слоев (Layer Normalization). В отличие от своего пакетного аналога, Layer Norm выполняет все статистические вычисления независимо для каждого конкретного обучающего примера. Вместо усреднения по батчу, среднее значение и дисперсия рассчитываются по всем признакам (каналам) внутри одного слоя для одного объекта.
Сравнение этих подходов позволяет четко разграничить области их оптимального применения:
- Batch Normalization: Вычисляет статистики "по вертикали" — вдоль всего мини-пакета для каждого отдельного признака. Данный метод остается стандартом для сверточных нейронных сетей (CNN), где пространственная структура изображений выигрывает от пакетного усреднения.
- Layer Normalization: Вычисляет статистики "по горизонтали" — в рамках одного объекта по всем его внутренним компонентам. Это свойство сделало Layer Norm идеальным решением для архитектур Transformer (включая популярные большие языковые модели семейства GPT), так как метод не зависит от размера батча и прекрасно справляется с динамической длиной контекста.
Внедрение Batch и Layer Normalization позволило инженерам использовать более агрессивные темпы обучения (learning rate), ослабило жесткие требования к инициализации весов и сделало процесс обучения глубоких нейросетей прогнозируемым и устойчивым.