В рамках курса EE364A в Stanford Online Стивен Бойд (Stephen Boyd) представил глубокий разбор практических аспектов выпуклой оптимизации, сосредоточившись на том, как математические штрафные функции отражают реальные инженерные предпочтения. Лекция охватывает широкий спектр тем: от управления космическими аппаратами до очистки изображений и борьбы с неопределенностью в данных, предлагая слушателям не только формулы, как отмечается в материале, но и «уличные» приемы эффективного моделирования.
😤 Математика «раздражения»: функции штрафа и разреженность 0:05
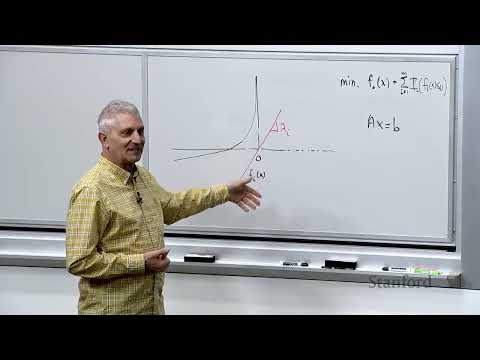
Центральная идея лекции Стивена Бойда заключается в том, что функция штрафа (penalty function) — это математическое описание того, насколько проектировщика «раздражает» остаток (residual) определенной величины . Традиционно в инженерии на протяжении сотен лет доминировал квадратичный штраф (L2-норма), во многом благодаря наличию аналитических решений . Однако Стивен Бойд подчеркивает, что выбор функции штрафа радикально меняет структуру решения:
- L1-норма (абсолютное значение): Обладает «острой» точкой (kink) в нуле. Стивен Бойд объясняет, что L1 относительно «спокойно» относится к большим остаткам (по сравнению с квадратичной функцией), но крайне «возмущена» даже мелкими отклонениями от нуля .
- Эффект разреженности (Sparsity): Главное свойство L1-нормы — она зануляет многие элементы решения. Стивен Бойд называет L1 «разреживателем» (sparsifier) . Это находит прямое применение в управлении ракетами и спутниками: если использовать L1-норму для расчета силы тяги, двигатели будут работать короткими импульсами («пыхами»), а не непрерывно .
- Штраф Хьюбера (Huber Penalty): Стивен Бойд называет это «штрафом Франкенштейна», который сочетает в себе лучшее от двух миров: квадратичную функцию для малых остатков и линейную (L1) для больших . Это делает оптимизацию устойчивой к выбросам.
🎛️ Инженерные «ручки» и проектирование входных сигналов 5:35
Обсуждая проектирование входных сигналов для систем (например, в электротехнике или механике), Стивен Бойд вводит понятие многокритериальной задачи. В таких задачах у инженера есть несколько целей: точность траектории, минимизация затрат энергии и плавность сигнала .
Для балансировки этих целей используются весовые коэффициенты, которые Стивен Бойд называет «дизайнерскими ручками» (design knobs), а в машинном обучении — гиперпараметрами . По мнению лектора, во многих приложениях (кроме машинного обучения) не существует строгого научного обоснования выбора этих параметров. Процесс выглядит так: инженер выбирает значения, смотрит на результат (например, «расход топлива отличный, но тряска слишком сильная»), меняет коэффициенты в два раза и перезапускает расчет .
Пример смены типа штрафа в управлении:
- Если штрафовать квадрат разности между соседними значениями сигнала, получится плавный сигнал.
- Если штрафовать абсолютное значение разности (L1), получится сигнал с «разреженной производной».
- Результатом станет кусочно-постоянный сигнал . Стивен Бойд отмечает, что это стандарт в химической промышленности, где режим работы нагревателя или скорость подачи сырья меняются ступенчато .
🖼️ Реконструкция сигналов и полная вариация (Total Variation) 12:15
При очистке зашумленных сигналов (denoising) выбор регуляризатора определяет, что именно мы считаем «правдоподобным» сигналом . Стивен Бойд сравнивает классическое квадратичное сглаживание с низкочастотным фильтром: оно убирает шум, но «размывает» резкие переходы и фронты .
Альтернативой является метод «полной вариации» (Total Variation, TV) — использование L1-нормы для первой производной сигнала . Это позволяет:
- Сохранять резкие скачки в данных (в эконометрике их называют «шоками») .
- Эффективно очищать изображения, сохраняя границы объектов (например, край подиума или стула), в то время как квадратичное сглаживание просто размоет картинку .
Стивен Бойд предупреждает, что избыточная TV-регуляризация превращает реальное фото в «мультяшное» изображение, состоящее из областей с абсолютно одинаковым цветом .
🛡️ Борьба с неопределенностью: стратегия «уличного бойца» 25:15
Один из самых провокационных тезисов лекции касается того, как на самом деле работают с неопределенностью в данных. Стивен Бойд утверждает, что в 99% случаев практики в индустрии (включая такие гиганты, как Amazon) просто игнорируют неопределенность, используя средние значения .
Однако для создания по-настоящему надежных систем существуют три подхода :
- Стохастический: Предполагаем распределение вероятностей.
- Худший случай (Worst-case): Минимизируем ущерб при самом неудачном сценарии.
- Гибридный (Robust Stochastic).
Стивен Бойд делится «секретным приемом»: для достижения 90% успеха не нужны сложные формулы, достаточно признать наличие неопределенности . Его рецепт: попросите отдел моделирования дать вам не одну модель, а 10 «правдоподобных» вариантов . Если оптимизировать решение так, чтобы оно работало для всех десяти, результат будет на порядки надежнее, чем при использовании одной «идеальной» модели. При этом Стивен Бойд иронизирует, что если модели на разные дни недели совпадают до восьмого знака — это «фрод» (мошенничество), и авторы просто скопировали данные .
📊 Статистическое оценивание через призму оптимизации 49:30
Стивен Бойд объясняет связь между классической статистикой и оптимизацией через метод максимального правдоподобия (Maximum Likelihood Estimation). Он переводит статистические предположения на язык штрафных функций:
- Гауссово (нормальное) распределение шума эквивалентно методу наименьших квадратов (L2) .
- Распределение Лапласа («жирные хвосты») соответствует L1-нормам . Оно более устойчиво к выбросам, так как считает вероятность больших отклонений значительной и не «паникует» при их появлении .
- Штраф Хьюбера статистически эквивалентен предположению о шуме, который в центре распределен по Гауссу, а на краях имеет экспоненциальные «хвосты» .
В конце лекции Стивен Бойд затрагивает тему логистической регрессии, отмечая важный нюанс: если данные линейно разделимы (например, все пациенты младше 32 выжили, а старше — нет), метод максимального правдоподобия без регуляризации выдаст бесконечные коэффициенты, пытаясь сделать наклон графика бесконечно крутым .